

3DMakerPro Raven Review: The €1229 LiDAR Scanner — Specs, Price, and Comparison
The handheld LiDAR scanner market just got a lot more interesting. 3DMakerPro has officially launched Raven, and with an early bird price starting at €1229+VAT, it's significantly undercutting any standalone LiDAR/SLAM scanner on the market. But a low price only matters if the hardware delivers.
Here's an in-depth breakdown of the specs and Raven's positioning within the 3DMakerPro lineup. We compare its positioning against competitors from FJD Trion, SHARE, and others. We also analyze what the community is already highlighting as potential issues.
What is 3DMakerPro Raven?
Raven is 3DMakerPro's entry-level LiDAR spatial scanner. It's a smaller, lighter, and significantly more affordable alternative to the current Eagle (launched in early 2025) and the professional-grade Hawk.
Considering 3DMakerPro's progression from structured light object scanners (Mole, Seal, Otter) into spatial LiDAR territory with Eagle, Raven represents a logical next step. The goal is to bring standalone handheld LiDAR scanning down to a price point where hobbyists, content creators, and small businesses can realistically justify the purchase.
The device was first spotted at Formnext 2024. Early hands-on impressions made it seem like a compact version of the Hawk, featuring an RTK expansion slot, a touchscreen, and a target price of $999. These early details have now been confirmed by the official spec sheet. The price points match what's on the 3DMakerPro store page.

For those unfamiliar with 3DMakerPro's scanning workflow, the videos on the Eagle scanner offer a good overview of the RayStudio software pipeline. They showcase the scanning process and the general output quality one can expect. Raven shares the same software ecosystem and output formats. These tutorials thus provide directly relevant context for the Raven user experience.
3DMakerPro Raven Specifications
From the published spec sheet by 3DMakerPro :
Accuracy: 2cm at 10m, 3cm at 20m, 5cm at 40m
LiDAR Detection Range: 40m at 10% reflectivity / 50m at 80% reflectivity
Maximum Scan Coverage: 80–100m (Note: 3DMakerPro lists this as "scanning range"—see explanation below)
Field of View: 360° horizontal × 40° vertical
Point Cloud Rate: 150,000 pts/sec
Laser: 905nm, Class 1 eye-safe (IEC60825-1:2014)
Camera: 12MP, 1 camera or (2 camera system for MAX version)
HDR Mode: No
Screen: 3.9" AMOLED
Battery: 12,000 mAh—approx. 2 hours work time, supports external power while charging
Weight: 1.1kg
Dimensions: 148 × 288 × 98 mm
Onboard Processing: 8 Core, 2.4GHz, 32GB memory (expandable via TF card)
Data Interface: USB-C ×1
Power Input: USB-C ×1
Network: Wi-Fi 5
Output Formats: 3D PLY color point cloud, 3D PLY gaussian splatting, 3D OBJ color polygonal model
Expansion: RTK Expansion Kit, Insta360 X4/X5 Expansion Kit, various accessories
A note on "Scanning Range" and "Scan Radius" in 3DMakerPro Raven: read this before comparing
This is a detail that can cause confusion when comparing LiDAR scanners and is worth clarifying. 3DMakerPro uses two distinct specifications that sound similar but mean different things: "Scan Range" is the LiDAR detection distance. It indicates how far the laser can detect a surface from the device. "Scanning Range" is roughly the total coverage diameter, approximately twice the range. When 3DMakerPro states Eagle has a "140m Scanning Range," this correlates to a 70m detection range.
FJD Trion, SHARE, and Livox all specify "Scan Range" as detection distance, equivalent to what 3DMakerPro calls "Scan Range." A direct comparison between 3DMakerPro's "140m Scanning Range" and FJD's "70m Scan Range" is therefore misleading. They are actually describing the same sensor capability. Every comparison in this article uses the consistent metric of LiDAR Detection Range, i.e., the distance reached by the sensor at 80% reflectivity, unless otherwise indicated.
3DMakerPro Raven Pricing
This is where Raven comes in. At launch, there are four configurations available, at discounted prices:
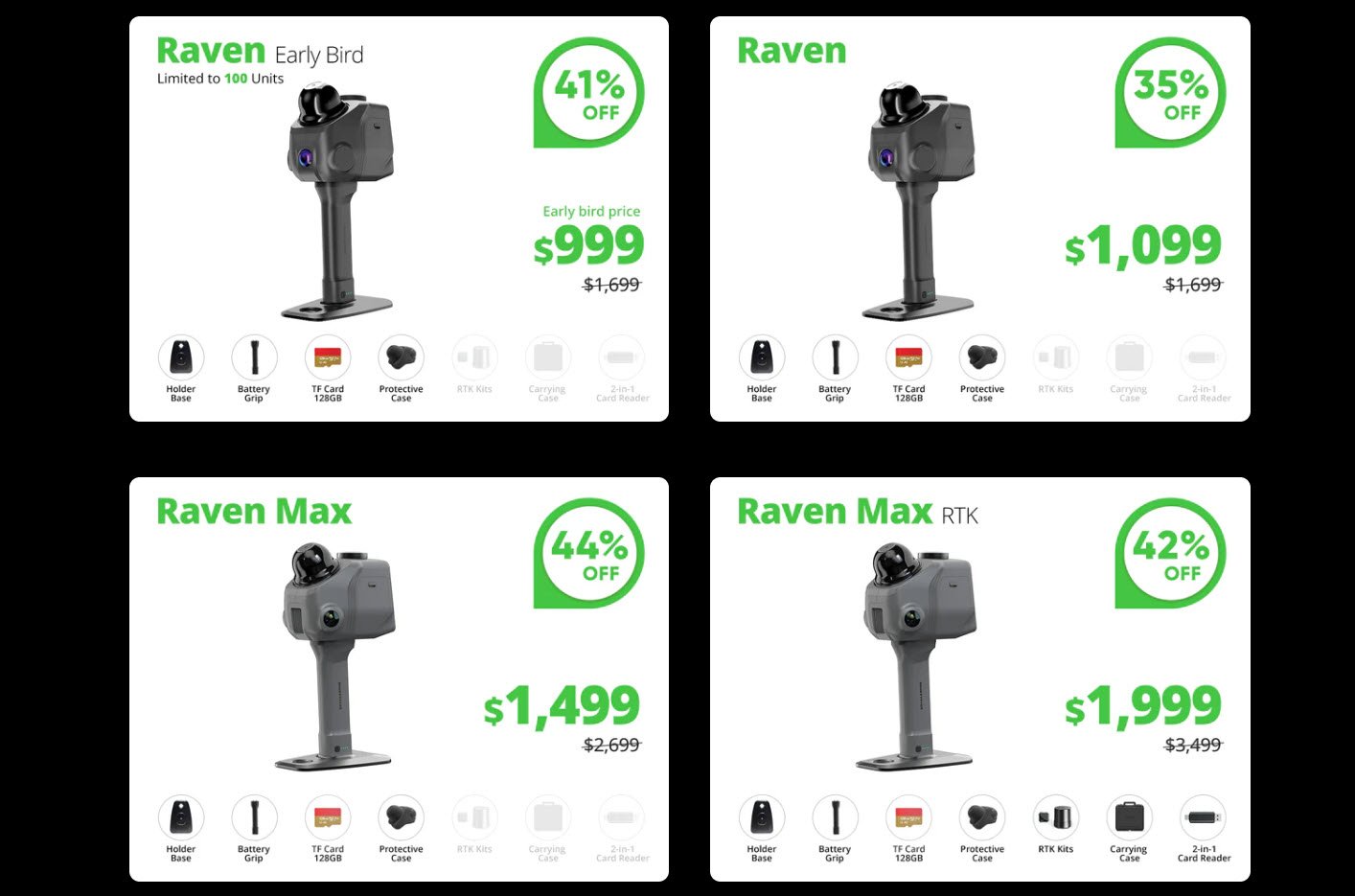
| Variant | Key Inclusions | ||
| Early Bird Raven | Support Base, Battery Handle, 128GB TF Card, Protective Case | ||
| Raven | Same as above | ||
| Raven Max | Adds RTK Kit, Carrying Case, 2-in-1 Card Reader | ||
| Raven Max RTK | Full Kit with RTK, Carrying Case, Card Reader |
Raven vs Eagle vs Hawk vs FJD Trion vs SHARE: Comprehensive Comparison
Here's how the current handheld LiDAR/SLAM scanners compare. All LiDAR Range values use a detection distance at 80% reflectivity for consistent comparison. For details, see the note on Scanning Range vs. Range above.
| Specification | Raven | Eagle | Hawk | FJD P2 | FJD V4e | SHARE S20 SE | SHARE C1 |
| Accuracy | 2cm at 10m | 2cm at 10m | 1.5cm at 10m | 1.2cm pole | 3cm pole | ≤1cm rel. | <1cm |
| LiDAR Range* | 50m | 70m | 70m | 70m | 50m | 70m | 70m |
| Points/sec | 150k | 200k | 480k | 200k | 154k | 200k | 200k |
| Vertical FoV | 40° | 59° | 63.5° | 59° | ~70° | 59° | ~59° |
| Camera | 12MP (1-2) | 48MP (1-4) | 13MP 1" | 2x12MP | Phone | 2x2.3MP | Dual Wide |
| HDR | NO | 8K HDR | YES | NO | NO | NO | NO |
| Weight | 1.1kg | 1.5kg | ~0.9kg | 0.7kg | 0.89kg | 0.955kg | ~0.575kg |
| Battery | ~2hrs | ~1hr | ~1hr Swappable | ~4hrs | 5+ hrs | ~3hrs | ~3hrs |
| RTK | Optional | Optional | Built-in | Optional | Built-in | Optional | NO |
| Standalone | YES | YES | YES | YES | No (Phone) | No (Phone) | No (Phone) |
| Gauss. Splatting | YES | YES | YES | YES | YES | YES | Coming soon |
| Price | $999-1,999 | ~$3,399+ | ~$8,999+ | ~$4,000+ | ~$4,299 | ~$4,499+ | $3,999 (KS) |
*LiDAR Range = Detection distance at 80% surface reflectivity. 3DMakerPro markets Eagle as having a "140m scanning range" and Raven as "100m scanning range". These figures represent the total coverage diameter, roughly twice the detection distance. They are thus not comparable to FJD or SHARE's "scan range" specifications. This table uses the consistent detection distance metric.
Understanding the LiDAR Sensor: Why it matters
The community is paying close attention to the LiDAR sensor Raven uses, and for good reason. It is arguably the most important component in any SLAM scanner.
The Livox Mid-360 has become the de-facto standard sensor in this class of handheld SLAM scanners. Manufactured by Livox, a subsidiary of DJI, it's a compact unit with a 360° × 59° FOV. It offers 200,000 points per second and a proven 70m detection range at 80% reflectivity.
Crucially, it has extensive SLAM algorithm support in the open-source robotics community. This includes Livox's LIO-Livox odometry system. It also boasts a strong track record in professional surveying and mapping applications. Numerous academic studies have validated its geometric accuracy. According to 3DMakerPro's specs, the Eagle uses this class of sensor. The FJD Trion P1 and P2 use sensors with matching specs, 200,000 points/s, 360° × 59° FOV, and 70m range. SHARE has confirmed that the S20/S20 SE directly uses the Mid-360, as documented on Livox's showcase page.
The published Raven specs – 150,000 pts/s, 360° x 40° vertical field of view, 50m detection range – clearly indicate that it is not using a Livox Mid-360. The narrower vertical field of view, 40° vs. 59°, is the most significant difference in practice. It means the Raven captures less environmental detail per pass, particularly on the vertical axis. Scanning tall structures will require more overlapping passes and additional time. Capturing ceilings in interior scans or working in confined spaces will also necessitate more passes. The lower point density, 150k vs. 200k, translates to a slightly lower level of detail per second. This limitation is less significant than the FOV reduction, however.
This is not necessarily a dealbreaker, as a cheaper sensor is how 3DMakerPro achieves the $999 price point. However, it is an important trade-off that you should understand before buying.
The LiDAR sensor directly impacts point cloud density and SLAM drift resistance. It also affects scanning reliability in challenging environments. Community members in 3DMakerPro’s Raven and Eagle Facebook groups have reported this as their main concern. This is a legitimate concern.
3DMakerPro has not publicly revealed the manufacturer or model of the Raven’s sensor (at least as far as I can tell).
A further omission is the missing IMU specifications. The IMU, or Inertial Measurement Unit, is critical for SLAM stability and drift control. This is especially true in featureless environments, such as long corridors, open fields, or tunnels.

Livox Mid-360 sensor module.
What Sets 3DMakerPro Raven Apart
The price is genuinely disruptive. At $999 to $1099 for the base Raven, you get a standalone LiDAR scanner with an AMOLED touchscreen, onboard processing, and Gaussian splatting output. You don’t need a phone while scanning. You also don’t need a laptop or tethering. The FJD Trion V4e LiDAR kit is the closest economic competitor in the handheld SLAM scanner market. However, it requires an iPhone 15+ and costs over $4,000, currently $4,299 on sale from $4,799. The SHARE C1 is targeting a similar prosumer audience via Kickstarter. However, its final sales price and delivery timeframe are yet to be finalized.
Two hours of battery life is a significant advantage over the Eagle’s ~one hour, according to 3DMakerPro’s own specs, which indicate 60 minutes for Eagle. You can realistically scan an entire building, inside and out, without needing a power bank. The Raven also supports external power while scanning, which is a convenient feature if you accidentally let it run dry.
Insta360 X4/X5 and RTK expansion allow the Raven to adapt to more use cases. For those interested in running their own workflows using Insta360 for Gaussian splatting and RTK/PPK, there are custom upgrade paths. I appreciate how this approach keeps the entry cost low. At the same time, it leaves room for more professional workflows.
It is fully standalone. Unlike the FJD V4e, which requires an iPhone 15+, and the FJD P2, which needs a smartphone or tablet for real-time monitoring via the FJD Trion Scan app, the Raven operates completely independently. The SHARE S20/C1 line requires the SHARE Capture app. The Raven is standalone thanks to its built-in 3.9” AMOLED screen and internal storage. For field use in remote locations, this is critical. It is equally important for users who want a simpler, more immediate workflow.
Where the Concerns Lie
The LiDAR sensor is a clear step down from the competition. As described previously, the Raven’s 150,000 pts/s, 40° vertical FOV, and 50m detection range place it below all other LiDAR scanners in this comparison. The narrower vertical coverage means more scanning passes in complex environments. It may also result in potentially weaker SLAM lock in spaces with vertical variations.
Community members in 3DMakerPro Raven and Eagle Facebook user groups have openly expressed this concern. The sensor appears to be a lower-grade unit intended for lower-end applications. For workflows where laser performance is more important than the camera, this is a distinct compromise.
No published IMU specifications. The IMU is essential for SLAM stability and drift control, and power users have called out its absence. But does this mean they don’t use one (or that it’s just not very good)—who knows.
3DMakerPro’s software track record is not the strongest. Having spent considerable time with the Eagle Max and RayStudio, this is one area where expectations need to be realistic. The Eagle launched in early 2025 with an ambitious software roadmap. Gaussian Splatting processing was scheduled for April 10, 2025. Point cloud meshing was slated for April 15. Panoramic image stitching was planned for April 30, according to 3DMakerPro’s RayStudio tutorial page. In practice, the features arrived much later than anticipated. Independent reviews, including a detailed test by 3Printr.com, consistently described RayStudio as functional but not yet mature.
Stability issues, particularly on macOS, have been well-documented. The post-processing workflow still requires patience. The software has improved over the last year, but it has been a slow process. Since Raven shares the same software ecosystem, we should expect a similar trajectory. It’s not quite a fully polished "beta-tester" experience yet.
Hopefully, the Eagle and Hawk have paved the way for Raven to have a smoother launch!

Philipp Kreiser (PrinterForFun) expresses skepticism about the Lidar sensor and early scanning.
Is RTK = real-time or post-processed only? This remains quite murky regarding the 3DMakerPro product line. The official Eagle FAQ describes RTK as real-time kinematic positioning. However, the RayStudio workflow tutorial on the 3DMakerPro blog shows RTK data being applied as a post-processing step. It specifically states to "select the RTK option in the processing steps."
Reports from community members are mixed. Some doubt that true real-time RTK correction is reliably functioning. The suspicion remains that this is effectively PPK, i.e., post-processed kinematic.
If geo-referenced accuracy is important to your workflow, this is worth verifying with actual user reviews. I hope to provide you with a review unit before you commit to Raven’s RTK kit.
For comparison, both the FJD Trion line and the SHARE S20 RTK offer well-documented real-time RTK workflows. They also boast proven accuracy specifications, albeit at vastly different price points.
Early scan samples have not been impressive. Philipp Kreiser’s (PrintedForFun / 3D Scanning Users Group) walkthrough video highlighted that the earliest published Raven scans did not look particularly convincing. Pre-release hardware will improve with firmware and software updates. However, there is limited independent scan data available to assess real-world performance at present.
12MP cameras with no HDR mean that colored point clouds and Gaussian Splatting scenes will not match the visual quality of the Eagle. The latter uses 48MP cameras with 8K HDR output. They also won't reach the quality of the SHARE S20’s dual 16MP 1-inch cameras with mechanical shutters. Where visual fidelity is important, such as virtual tours or presentation-grade Gaussian Splatting, this is a clear downgrade. The same applies to real estate walkthroughs.
Who is the Raven actually for?
The Raven very much positions itself as an onramp to the world of handheld LiDAR scanning. Its target audiences are:
Those graduating from iPhone or iPad LiDAR. If you’ve used Polycam, SiteScape, or Scaniverse with your phone’s built-in LiDAR and have hit the ceiling of what these tools can do, the Raven is a massive step up. It improves on range, scanning volume, point density, and workflow. It also offers a price point that doesn’t require severe professional justification.
Hobbyists, makers, and content creators looking to capture rooms, buildings, or outdoor environments for personal projects, game asset creation, Gaussian splatting experiments, or documentation are ideal audiences. The standalone workflow and sub-$1,000 entry price make this scanner an almost impulse purchase. No other handheld LiDAR scanner has ever been this accessible.
Small businesses looking to explore virtual tours and spatial documentation can do so without purchasing professional survey equipment. Real estate agents, event venues, and renovation businesses might find the Raven to be a “good enough” level of spatial capture for non-critical applications.
For professional surveyors, architects, or anyone involved in BIM/CAD: the Raven is likely not the tool for you. The FJD Trion P2 offers 1.2cm post-processed accuracy, multi-SLAM fusion, and HyperDense+ technology. It also includes dual 12MP cameras and the proven FJD Trion software ecosystem. The SHARE S20 offers ≤1cm relative accuracy and a confirmed Livox Mid-360 sensor. It also has dual 16MP 1-inch cameras with mechanical shutters. The 3DMakerPro Hawk claims 1.5cm accuracy at 10m and 480,000 pts/s with multi-echo LiDAR. It also offers an IP65 rating. All of these systems perform significantly better than the Raven, albeit at commensurately higher price points.
The Bottom Line
The 3DMakerPro Raven does something no other standalone handheld LiDAR scanner has done. It makes the technology accessible for under $1,000. The compromises are real and have already been documented. The LiDAR sensor has lower specifications and a narrower field of view. The detection range is reduced, and the cameras are simpler, with no HDR. The software ecosystem is still maturing. However, the value proposition at this price point is hard to ignore.
The question isn't whether the Raven is better than a $4,000+ scanner. It isn't. The real question is whether it's good enough to open the door to a new generation of users. We're talking about people who would never have considered LiDAR scanning before. Based on the specs, the price, and the expansion path, the answer is likely yes. But it comes with the caveat that you need to have realistic expectations. You need to consider software polish and scan quality compared to established competitors.

 https://www.instagram.com/3digital.tech/
https://www.instagram.com/3digital.tech/