
Genauigkeit der DJI Phantom 4 RTK-Messung und Photogrammetrie
Zusammenfassung
In den letzten Jahren haben sich unbemannte Luftfahrzeuge (UAVs), allgemein bekannt als Drohnen, zunehmend zu einem beliebten Werkzeug zur Erfassung von Luftdaten in den Bereichen Bauwesen, Vermessung, Bergbau und Versicherungen entwickelt. Mithilfe der Photogrammetrie erfassen diese Branchen Luftbilder und generieren wertvolle Informationen aus großen Datensätzen, die es ermöglichen, Veränderungen zu sehen und zu messen, die im Laufe der Zeit auf Baustellen, Bergwerken und Liegenschaften auftreten.
Photogrammetrie ist keine neue Wissenschaft und wurde lange vor dem Aufkommen von Drohnen für topografische Kartierung, Architektur und Ingenieurwesen verwendet. Aber der Aufstieg der Computer-Vision-basierten Photogrammetrie in den letzten Jahren verlief parallel zur Entwicklung erschwinglicher kommerzieller Drohnenhardware und -software. Die Einfachheit und Automatisierung der heutigen Lösungen ermöglicht es Fachleuten, diese fliegenden Roboter in bestehende Arbeitsabläufe zu integrieren, um große Bereiche zu kartieren und hochauflösende 3D-Modelle zu erstellen. Mit diesen Daten können wir die Welt um uns herum genauer und schneller analysieren als mit herkömmlichen Messmethoden wie Feldstudien und manuellen Messungen. Wir haben bereits gezeigt, wie Drohnen mithilfe von Bodenkontrollpunkten (GCPs) bei realen Messungen eine Genauigkeit von 1 % erreichen können.
GCPs sind definierte Punkte auf der Erdoberfläche, die einen bekannten georeferenzierten Standort haben. Durch die Verwendung von GCP in Kombination mit photogrammetrischen Luftbilddaten kann eine Zentimetergenauigkeit erreicht werden, indem diese Punkte auf unserer Luftbildkarte „festgelegt“ werden. GCPs sind zwar korrekt, aber in der Regel ein zeitaufwändiger Prozess und erfordern häufig eine Platzierung während der gesamten Lebensdauer eines Projekts. Als GPS in den 1980er Jahren zum ersten Mal verwendet wurde, war die einzige Möglichkeit, mit GPS eine Position im Subzentimeterbereich zu erreichen, die Nachbearbeitung mit GCP, die Tage dauern konnte, um die Daten genau zu erfassen. In den frühen 1990er Jahren wurde die RTK-Technologie (Real Time Kinematic) eingeführt, und die Inspektoren erreichten eine zentimetergenaue Positionierung in Echtzeit, ohne dass eine Nachbearbeitung erforderlich war.
In dieser Studie untersucht DroneDeploy, wie die Genauigkeit photogrammetrischer Karten validiert und verbessert werden kann Phantom 4 RTK (P4 RTK) von DJI, eine Drohne, die RTK-Technologie auf Luftbilder anwendet. Um die Genauigkeit des P4 RTK zu überprüfen, hat DroneDeploy ein Kontrollpunktsystem für eine Vermessung von Gebäudedächern erstellt.
Es wurden 32 Flüge aufgezeichnet, bei denen jeweils die Auswirkungen von Flughöhe, Überlappung und Anzahl der Bilder auf die resultierende Kartengenauigkeit untersucht wurden, nachdem diese Bilder über die Karten-Engine von DroneDeploy verarbeitet wurden. Diese Datensätze wurden dann verwendet, um sowohl die horizontale als auch die vertikale Genauigkeit der gemessenen Punkte sowie die Genauigkeit der linearen Messungen zu berechnen.
DroneDeploy stellte fest, dass P4 RTK-Kontrolldistanzen innerhalb von 0,27 % der GPS-Einheitsmessungen lagen, P4 RTK-Kontrolldistanzen innerhalb von 0,1 % von P4 Pro mit GCP-Messungen lagen, P4 RTK eine relative vertikale Genauigkeit von 2 cm und eine relative horizontale Genauigkeit von 1,2 cm erzeugt hat und dass 2D-Flüge und 3D-Flüge die Genauigkeit der Messung nicht wesentlich beeinflussten.
01 Einführung
Ziele dieser Studie
Das Hauptziel dieser Studie ist es, die hohe und lineare Messgenauigkeit von PK RTK im Vergleich zu herkömmlichen GPS-basierten Erfassungsmethoden zu demonstrieren. mit einem geerdeten GNSS-Empfänger. Die Ergebnisse geben eine Vorstellung von der Genauigkeit, die von jeder Methode erwartet werden kann. Der resultierende Datensatz kann auch verwendet werden, um zu bestimmen, ob eine Kartierungsmission mit Drohnen mit P4 RTK und DroneDeploy die Genauigkeitsanforderungen des Projekts erfüllen kann.
Beste Methode für eine genaue Datenerfassung
In dieser Studie werden wir auch Best Practices für die Erfassung hochpräziser Daten mit dem PK RTK untersuchen. Dazu gehört die Bestimmung des Missionstyps, der sowohl im 2D-Photogrammetriemodus als auch im 3D-Photogrammetriemodus die besten Ergebnisse liefert.
In dieser Studie verwendete Drohnenmodelle
Das primäre Drohnenmodell, das in dieser Studie verwendet wird, ist die DJI Phantom 4 RTK , das im Oktober 2018 von DJI herausgebracht wurde. Die Drohne wurde entwickelt, um kinematische Verarbeitung in Echtzeit zu verwenden, um hochpräzise Luftbildkarten zu erstellen. Neben der RTK-Einheit verwendet die P4 RTK auch ein redundantes GNSS-Modul, das zusätzliche Flugstabilität beim Fliegen in dichten Regionen mit schlechtem RTK-Signal bietet. DJI behauptet eine horizontale RTK-Positionierungsgenauigkeit von 1 cm und eine vertikale RTK-Positionierungsgenauigkeit von 1,5 cm. In Bezug auf absolute Messungen an photogrammetrischen Modellen gibt DJI eine Genauigkeit von 5 Zentimetern beim Fliegen von 100 Metern mit 2,7 Zentimetern GSD an.
Das RTK-Modul ist direkt in die Phantom 4 integriert, um eine Zentimetergenauigkeit für einen stabilen Flug und präzise Bilder mit Geotags zu bieten. Ein neues TimeSync-System wurde hinzugefügt, um den Flugregler, die Kamera und das RTK-Modul kontinuierlich auszurichten und sicherzustellen, dass jedes Foto die genauesten Metadaten verwendet und die Positionsdaten in der Mitte des CMOS-Sensors fixiert. Dieser RTK-Empfänger ist in der Abbildung unten zu sehen.

P4 RTK kann auch eine Verbindung zur Mobilstation D-RTK 2, NTRIP (Network Transport of RTCM via Internet Protocol) herstellen oder Satellitenbeobachtungsdaten speichern, die für Post Processed Kinematics (PPK) verwendet werden. Die D-RTK 2-Mobilstation wurde in dieser Studie nicht gemessen, stattdessen wurden die in diesem Bericht beschriebenen NTRIP-Methoden verwendet.
DJI Phantom 4 Pro wird auch in Verbindung mit GCPs verwendet, um als Steuerdaten zu fungieren. Diese Studie verwendet DJI-Modelle, da sie der weltweit größte Anbieter von kommerzieller Drohnenhardware sind und von Branchenexperten in den Bereichen Bau, Bergbau, Ermittlung und Versicherung verwendet werden. Es hat sich gezeigt, dass der Phantom 4 Pro im Vergleich zu anderen DJI-Modellen zum Zeitpunkt des Schreibens die genauesten photogrammetrischen Karten erstellt. Mit über 23.000 Flügen pro Monat ist sie die beliebteste Drohne, die von DroneDeploy-Kunden verwendet wird.
02 Szenario
Lineare Messgenauigkeit des Phantom 4 Pro
Unsere vorherige Studie befasste sich mit der linearen Messgenauigkeit unter Verwendung des DJI Phantom 4 Pro in Kombination mit GCP. Die Phantom 4 RTK-Drohne ist Teil der Drohnenserie Phantom 4 und verwendet dieselbe Kamera wie die Phantom 4 Pro. In dieser Studie haben wir gezeigt, dass relative lineare Messungen auf 1,1 % der manuellen Bodenmessungen genau waren. Durchschnittliche Messfehler zeigten, dass die Fehlerspanne bei einem mittleren Korrelationskoeffizienten von 0,42 proportional zur Flughöhe zunehmen würde. Es gab eine 0,35 %ige Verbesserung der Messgenauigkeit für Karten, die in einer Höhe von 66 Fuß überflogen wurden, im Vergleich zu Karten, die in einer Höhe von 100, 200 oder 400 Fuß überflogen wurden. Vieles davon kann der Bildqualität zugeschrieben werden und ermöglicht es einem menschlichen Bediener, das Zentrum eines solchen GCPS zu identifizieren, was bei Karten mit niedriger Auflösung schwierig sein kann.
Wir fanden heraus, dass die Verarbeitung mit Bodenkontrollpunkten den durchschnittlichen Messfehler für alle Kontrolllängen auf 0,5 Zoll reduzierte, eine Verbesserung um etwa das Zehnfache. Messfehler für GCP-Karten zeigten auch eine ähnliche 10-fache Reduzierung der Standardabweichung des Fehlers, was bedeutet, dass die GCP-Daten nicht nur genauer, sondern auch konsistenter und daher zuverlässiger für Anwendungen sind, wo sie benötigt werden.
Echtzeit-Kinematik (RTK) und Post-Process-Kinematik (PPK) Verfahren
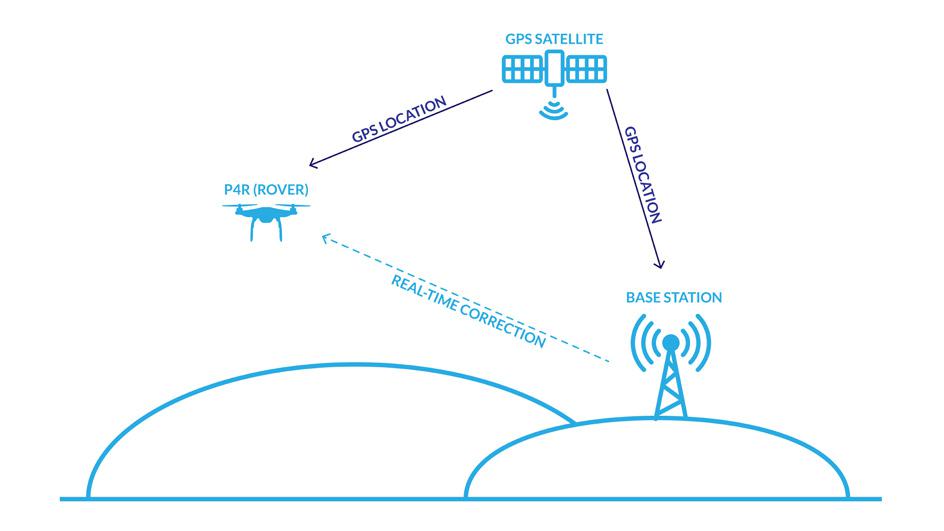
Kinematik ist ein gebräuchlicher Begriff, der in traditionellen GPS-Vermessungsmethoden verwendet wird, bei denen Empfänger in Bewegung sind. Um die RTK-Daten zu verarbeiten, benötigen Sie sowohl eine RTK-Basisstation als auch einen RTK-Rover, in diesem Fall die Phantom 4 RTK. Zur relativen Positionierung ist die in der Vermessung übliche Methode die „Stop and Go“-Technik. Die RTK-Verarbeitung hingegen erfordert keine Nachbearbeitung, um eine genaue Positionierung zu erreichen. Ein Funkgerät zum Referenzempfänger, einer lokalen Basisstation oder einer Netzwerk-Basisstation, überträgt seine Position in Echtzeit an den Rover. Dies ermöglicht Vermessungen im Feld und macht die Überprüfung der Messqualität während der Nachbearbeitung überflüssig. Ein RTK-Workflow-Diagramm ist in der Abbildung zu sehen.
PPK-Vermessungen ähneln RTK-Vermessungen, aber Positionen werden nicht in Echtzeit korrigiert. Es besteht normalerweise darin, eine feste Basisstation an einem bekannten Kontrollpunkt oder Denkmal zu platzieren, um eine Geolokalisierung zu ermöglichen. GPS-Daten werden dann gleichzeitig von der Basisstation und der fliegenden Drohne gesammelt. Die Daten werden dann von der Basisstation, dem Rover (Drohne) heruntergeladen und mit einer GPS-Software veröffentlicht. Diese Bilder können dann zur Verarbeitung in die Karten-Engine von DroneDeploy hochgeladen werden.
03 Methodik
Etablieren Sie eine Datenvalidierungsmethode unter Verwendung von GCPs und Kontrollpunkten
Um die Genauigkeit des Phantom 4 RTK zu testen, installierte DroneDeploy ein Kontrollpunktsystem auf demselben Testgelände, das in der vorherigen Studie verwendet wurde. Die Kontrollpunkte, GCPs, Kontrolldistanzen und ihre Anordnung sind in der folgenden Abbildung dargestellt.
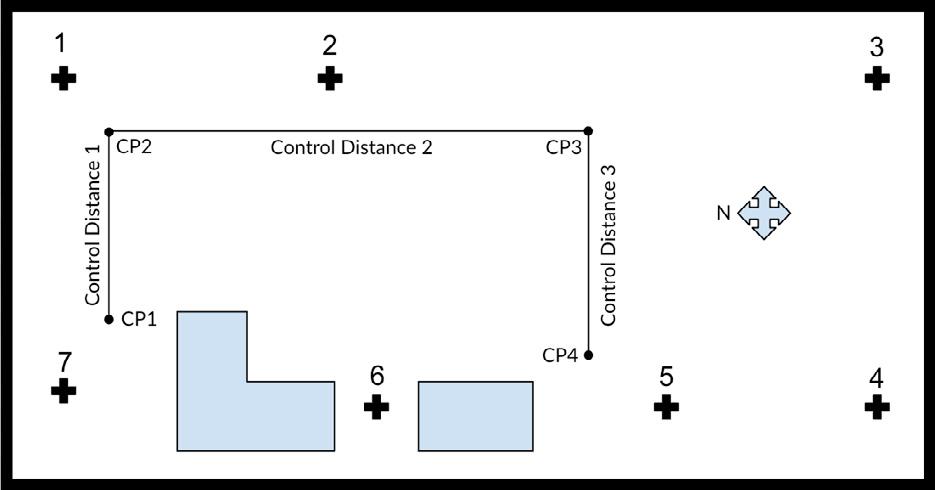
Das System bestand aus 7 verschiedenen 1 'x 1' GCPs, die auf unserem Testgelände platziert wurden. Diese Punkte wurden auf unterschiedlichen Höhen, Breiten- und Längengraden auf der Oberfläche platziert, um unterschiedliche Szenarien besser erfassen zu können. Zusätzlich wurden 4 Kontrollpunkte auf dem Dach platziert und die Abstände zwischen jedem mit einem Maßband gemessen, um die Länge zwischen den Punkten festzustellen. Sie wurden dann markiert und mit einem Trimble RTX GPS-Gerät gemessen, um die Breite, Länge und Höhe jedes der Punkte zu ermitteln. Diese Kontrollentfernungen zeigen die Unterschiede in Breitengrad, Längengrad und Höhe zwischen Phantom 4 Pro- und P4 RTK-Flügen.
Luftdatenerfassung
Um die Luftbilddaten zu erfassen, führte DroneDeploy über 30 Einzelflüge mit der DJI Phantom 4 RTK- und DJI GS RTK-App für RTK-Flüge und der Phantom 4 Pro V2.0 und DJI GS Pro-App für P4 Pro mit GCP-Flügen durch. SmartNet, ein Drittanbieter-Korrekturdienst, wurde für den RTK-Controller in Verbindung mit einem mobilen Hotspot verwendet. SmartNet ermöglicht hochpräzise, hochverfügbare Netzwerk-RTK-Korrekturen für jede Anwendung, jede Konstellation und ist gleichzeitig für jeden offen. SmartNet ermöglicht Genauigkeiten im Zentimeterbereich, die mit einem gemeinsamen Datum verknüpft sind.

Insgesamt 20 Flüge wurden mit der P4 RTK 100 Fuß über der Dachoberfläche sowohl im 2D- als auch im 3D-Photogrammetriemodus durchgeführt und dann mit der Map Engine von DroneDeploy verarbeitet. Ebenso wurden 12 Flüge mit dem Phantom 4 Pro durchgeführt und mit GCP mit der Map Engine von DroneDeploy verarbeitet, um als Kontrolle für den Vergleich der Ergebnisse zu dienen. Eine der mit Kontrollpunkten und GCPs verarbeiteten Luftbildkarten ist in Abbildung 5 oben zu sehen. Leichte Abweichungen wurden in Flugplanung, Beleuchtung und Höhe eingeführt, um beim Sammeln dieser Daten eine reale Umgebung zu simulieren.
Landkontrollpunkt-Datenerfassung für die Kontrolle
Um die GCPs zur Kontrolle zu erfassen, markierte DroneDeploy das geografische Zentrum der auf dem Dach positionierten Ziele mit einem Trimble-Katalysator. Die Zielpunkte hatten eine horizontale Standardabweichung von 0,24 cm und eine vertikale Standardabweichung von 0,49 cm zwischen den 7 Bodenkontrollpunkten und den auf dem Testgelände markierten Kontrollpunkten.
Diese Punkte wurden auch als Kontrollpunkte bei der Messung der PK-RTK-Genauigkeit im Vergleich zu GCP-Messungen verwendet. Der in der Abbildung unten gezeigte Trimble-Katalysator wurde aufgrund seiner Einfachheit, geringen Kosten und hochgenauen GNSS-Leistung ausgewählt. In einer unabhängigen Studie, die Anfang 2018 von Geo Job UAV durchgeführt wurde, folgerten sie: „Die Koordinaten des Katalysators lagen zwischen 0,25 Zoll und weniger als 1 Zoll der Ergebnisse des Vermessungsingenieurs.“ Dank seiner Integration mit der Trimble UAV Ground Control-Software bot es auch eine einfache Möglichkeit, Kontrollpunktdaten für die Verwendung mit UAV-Lösungen zu erfassen.

Trimble Catalyst ist eine GNSS-RTK-Positionsbestimmung „as a Service“ und kann mit jedem modernen Mainstream-Android-Smartphone verwendet werden. Die Hardwarekonfiguration besteht aus einem beliebigen modernen Android-Gerät, der Trimble Catalyst DA1-Antenne und einem Standardmessstab. Das Smartphone wird anstelle eines herkömmlichen Datenloggers verwendet und über das mitgelieferte USB-Kabel mit der Antenne verbunden.
Anstatt einen „Hardware“-GPS-Chip zu verwenden, verwendet Catalyst einen vollständig softwaredefinierten GNSS-Empfänger; Positionen werden in der Software unter Verwendung des Smartphone-Prozessors berechnet, wodurch die Anforderungen an Größe, Gewicht und Batterieleistung des gesamten Systems reduziert werden. Der Katalysator läuft bei 2–3 m ohne wiederkehrende Kontogebühren, aber mit einem monatlichen Abonnement (das die Hochgenauigkeitsmodi des Empfängers freischaltet und den Zugriff auf die lokalisierten VRS- und globalen Trimble RTX-Korrekturdienste von Trimble Now beschleunigt, können Genauigkeiten von bis zu 1–2 cm problemlos erreicht werden ohne zusätzliche Kosten). Um den Empfänger zu steuern, müssen Sie zwei Apps aus dem Google Play Store installieren, Trimble Mobile Manager und eine der speziell erstellten Anwendungen, in unserem Fall die Trimble UAV Ground Control-Software.
Aufgrund seiner Einfachheit, hohen Genauigkeit und Akzeptanz durch den Kundenstamm von DroneDeploy konnten wir Trimble Catalyst verwenden, um die Validierungsgenauigkeit gegenüber P4 RTK zuverlässig sicherzustellen. Wir empfehlen die Verwendung eines hochpräzisen GNSS-Empfängers wie Catalyst, wenn Sie Karten mit DroneDeploy verarbeiten, um die Genauigkeit der Karten auf Ihrer Baustelle für Audits und Sicherheit zu überprüfen.
04 Wichtigste Erkenntnisse
P4 RTK lieferte eine relative vertikale Genauigkeit von 2 cm und eine relative horizontale Genauigkeit von 1,2 cm
Jeder der 4 Kontrollpunkte wurde markiert und mit dem Trimble GPS-Gerät gemessen. Die folgende Tabelle 3 zeigt die vertikale Genauigkeit der Passpunkte sowohl in der RTK-verarbeiteten Karte als auch in der P4 Pro-Karte mit GCP. Der Fehler der GPS-Einheit wird angezeigt, um den vertikalen Messfehler von Trimble Catalyst zu verstehen. Für jedes GCP und jeden Kontrollpunkt wurden etwa 30 Messungen erfasst und gemittelt.
Aus diesen Messungen erhalten wir eine relative vertikale Genauigkeit von etwa 3,3 cm und eine relative horizontale Genauigkeit von 2,01 cm. Die relative vertikale Genauigkeit aller Passpunkte in der P4-RTK-Karte betrug 2,00 cm. Die relative vertikale Genauigkeit des P4 Pro mit GCPs zum Vergleich betrug 1,95 cm.

Tabelle 3. Vergleich der vertikalen Genauigkeit von P4 RTK mit P4 Pro mit GCP-Messungen
Mit der P4 RTK haben wir eine relative horizontale Genauigkeit von 1,20 cm erreicht. Mit dem P4 Pro und GCPs haben wir eine relative horizontale Genauigkeit von 0,90 cm erreicht. In dieser Studie haben wir gezeigt, dass die P4 RTK eine relative vertikale Genauigkeit von 2,00 cm und eine relative horizontale Genauigkeit von 1,20 cm erreichen kann, wenn sie auf 33 Fuß (100 Fuß) gebracht wird. Es ist auch wichtig zu beachten, dass die Genauigkeitsmessungen für P4 RTK mit den Anmerkungs- und Messwerkzeugen von DroneDeploy durchgeführt wurden. Die GSD für die resultierenden Karten beträgt im Durchschnitt 0,4 Zoll / px.
Warum ist das wichtig?
Die Bestimmung genauer Höhen ist ein wesentlicher Bestandteil vieler Bauprojekte wie Straßen, Brücken und Autobahnprojekte. Entwässerungsleitungen, Entwässerungsstrukturen und andere Autobahnmerkmale werden anhand bekannter und bestehender Grundpläne, endgültiger Höhen oder Entwurfspläne entworfen. Die Vor- und Endquerschnitte bestimmen auch die Volumengrößen. Darüber hinaus sind genaue Höhen entscheidend, um die Zuverlässigkeit von photogrammetrischen Kartierungs- und Orthofotoprodukten in DroneDeploy und anderer photogrammetrischer Software sicherzustellen.
Aufgrund ihrer Bedeutung in allen anderen Phasen der Projektentwicklung werden vertikale Messungen an einem Kontrollpunkt, dem so genannten GCP, durchgeführt. Aufgrund des erheblichen nachgelagerten Effekts ungenauer vertikaler Messungen ist dies ein kritischer Bestandteil der Vorkonstruktion, und die daraus resultierende Fehlerreduzierung ist von größter Bedeutung.
P4 RTK Kontrollentfernungen innerhalb von 0,1 % von P4 Pro mit GCP-Messungen
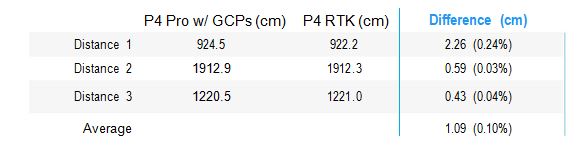
Bei der linearen Messgenauigkeit der DJI-Drohnenplattformen und der Photogrammetrie haben wir gezeigt, dass die Verwendung eines Phantom 4 Pro mit GCP eine Fehlerquote von etwa 0,64 % ergeben würde. Mit einem Phantom 4 RTK konnten wir im Vergleich zu Messungen in der „realen Welt“ eine Fehlerspanne von etwa 0,27 % erzielen. In Tabelle 2 vergleichen wir die PK-RTK-Genauigkeit mit P4 Pro. Im Durchschnitt liegen die P4-RTK-Messungen innerhalb von 1,09 cm oder 0,10 % der mit GCP verarbeiteten P4 Pro-Messungen. Diese Ergebnisse zeigen, dass ein Benutzer bei Verwendung einer Phantom 4 RTK-Drohne eine durchschnittliche Genauigkeit von 1,09 cm auf den RTK-verarbeiteten Karten in DroneDeploy erwarten kann, verglichen mit ähnlichen Karten, die mit der Phantom 4 Pro verwendet und mit GCP verarbeitet wurden.
Warum ist das wichtig?
Die Genauigkeit der linearen Messung ist eine wichtige Metrik, die aufgrund ihrer realen Anwendungen zu berücksichtigen ist. Während es wichtig sein kann, die horizontale und vertikale Genauigkeit eines einzelnen Punktes zu untersuchen, betrachten viele Tiefbauprojekte Höhenlinien, Entwässerung entlang einer Straße, volumetrische Bestands- oder Materialflächen, alles basierend auf der Genauigkeit des Punktes – Punkt-zu-Punkt Punktmessungen.
Dieser Prozess beinhaltet das Verständnis der Änderung der Genauigkeit beim Messen der Variation zwischen Punkten. Beispielsweise könnte eine horizontale oder vertikale Genauigkeit von ± 2 cm einer linearen Messgenauigkeit von ± 4 cm zwischen 2 Punkten entsprechen. Dies bietet ein greifbareres Verständnis dafür, wie sich die Genauigkeit auf die Messungen einer Straße, Brücke, Autobahn oder eines anderen Bauprojekts auswirken könnte.
P4 RTK-Kontrollentfernungen innerhalb von 0,27 % der Trimble-Katalysatormessungen
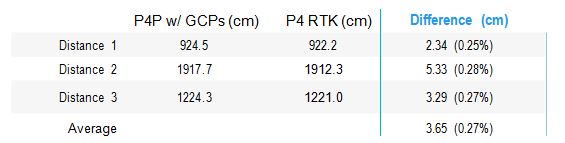
Nachdem die P4-RTK-Karten in DroneDeploy verarbeitet wurden, wurden die Kontrollentfernungen kodiert und auf allen Karten mit den Messwerkzeugen von DroneDeploy gemessen. Der Vergleich zwischen den P4-RTK-Kartenmessungen und den realen Messungen ist in Tabelle 1 unten zu sehen. Der durchschnittliche Fehler für P4-RTK-Karten lag bei 3,65 cm oder etwa 0,27 % der realen Messungen. Zum Vergleich: Bei Verwendung von GCP kann ein Benutzer eine Genauigkeit von 3 cm erwarten, und bei Verwendung eines GPS-Geräts, z. B. eines Trimble-Katalysators, kann ein Benutzer eine Genauigkeit von 3 cm erwarten.
Betrachtet man nur die XY-Genauigkeit der Kontrollpunkte, bietet die P4 RTK eine relative horizontale Genauigkeit von 1,2 cm. Diese Ergebnisse zeigen, dass ein Benutzer bei Verwendung einer Phantom 4 RTK-Drohne im Durchschnitt eine lineare Messgenauigkeit von 3,65 cm auf RTK-verarbeiteten Karten in DroneDeploy erwarten kann. Hinweis: Messungen in der realen Welt wurden mit einem Maßband durchgeführt.
2D- und 3D-Flüge hatten keinen wesentlichen Einfluss auf die Genauigkeit der Messungen
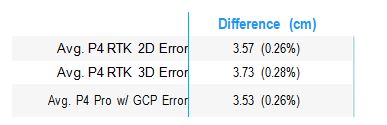
Insgesamt wurden fünf 2D- und fünf 3D-Photogrammetrieflüge mit der DJI GSR-App mit P4 RTK geflogen. Die Ergebnisse dieser Studie können in Tabelle 4 unten eingesehen werden. Der mittlere lineare Messfehler für 2D-Flüge betrug ungefähr 3,57 cm oder 0,26 %. Der durchschnittliche lineare Messfehler für 3D-Flüge betrug ungefähr 3,73 cm oder 0,28 %. Der mittlere lineare Messfehler für P4 Pro-Flüge betrug ungefähr 3,53 cm oder 0,26 %. Bei einer Fehlerspanne von 0,16 cm zwischen 2D- und 3D-Flügen haben wir keine statistisch signifikante Abweichung in der Genauigkeit der linearen Messung. Beim Fliegen der P4 RTK für hochpräzise Missionen hängt die Wahl zwischen 2D oder 3D von den Bedürfnissen des Benutzers ab, 2D im Flug für relativ flaches Gelände und 3D-Flug für Strukturen, Gebäude oder andere hohe Objekte.
05 Fazit
Die Messgenauigkeit des Phantom 4 RTK ist in der Lage, die topografischen Anforderungen zu erfüllen
Der Genauigkeitsgrad, den Sie von bestimmten Projekten erwarten würden, hängt von der endgültigen Anwendung und der beabsichtigten Verwendung der Umfragedaten ab. Die akzeptable Genauigkeit kann 30 cm oder weiter von der erkannten Position entfernt sein. Bei einigen Projekten kann der maximal akzeptable Fehler 5-7 cm oder weniger betragen. Gemäß dem USGS Global Navigation Satellite System Committee liegt es in der Verantwortung des Vermessungsingenieurs, die Anforderungen an die Vermessungsgenauigkeit zu kennen und die Genauigkeit seines Empfängers in Kombination mit der Genauigkeit der erhaltenen Korrekturinformationen basierend auf der Qualität und dem Ort der Korrektur abzugleichen.
Unternehmen können heute mit herkömmlichen Sensormethoden eine horizontale Genauigkeit von weniger als 3 cm erreichen. Diese ermöglichen es ihnen, mit Leichtigkeit genaue Umfragen, Angebote, Klassifizierungsoperationen und umfangreiches Projektmanagement durchzuführen. Die meisten Erkennungsgradkarten bieten traditionell eine Genauigkeit von weniger als 3 cm in XY-Richtung und eine Genauigkeit von ungefähr 9 cm in Z-Richtung.In dieser Studie haben wir gezeigt, dass das RTK Phantom 4 eine relative vertikale Genauigkeit von 2 cm und eine relative horizontale Genauigkeit von 1,20 bieten kann cm mit Karten, die auf DroneDeploy Map Engine verarbeitet wurden (im Durchschnitt).
Basierend auf diesen Ergebnissen empfiehlt DroneDeploy die Verwendung des Phantom 4 RTK, um genaue Karten zum Messen von Punkt-zu-Punkt-Entfernungen zu erstellen. Sie können nicht nur genaue Ergebnisse erzielen, sondern in den meisten Fällen werden durch die Verwendung des Phantom 4 RTK für Vermessungen die mit herkömmlichen Methoden verbundenen Kosten gesenkt, einschließlich der Kosten für Arbeit, Hardware und Software. Dies spiegelt sich auch in den allgemeinen Vorteilen wider, die unsere Kunden gewinnen, wie z. B. erhöhte Produktivität, schnellere Analysezeiten, bessere Zusammenarbeit und größere Sicherheit am Arbeitsplatz. Die Verwendung einiger Bodenkontrollpunkte (GCP 1-2) wird jedoch weiterhin empfohlen, um die Genauigkeit zu gewährleisten und die Rechenschaftspflicht für alle Messungen zu gewährleisten.

 https://www.instagram.com/3digital.tech/
https://www.instagram.com/3digital.tech/