
Precisione della misurazione del DJI Phantom 4 RTK e fotogrammetria
Sommario
Negli ultimi anni, i velivoli senza pilota (UAV), comunemente noti come droni, sono diventati sempre più uno strumento popolare per la raccolta di dati aerei nelle costruzioni, nelle rilevazioni topografiche, nelle attività minerarie e nelle assicurazioni. Utilizzando la fotogrammetria, queste industrie acquisiscono immagini aeree e generano preziose informazioni da insiemi di dati di grandi dimensioni, rendendo possibile vedere e misurare le modifiche che si verificano nel tempo nei cantieri, miniere e proprietà.
La fotogrammetria non è una scienza nuova ed è stata utilizzata per la mappatura topografica, l’architettura e l’ingegneria molto prima dell’avvento dei droni. Ma l’ascesa della fotogrammetria basata sulla visione computerizzata negli ultimi anni è andata in parallelo con lo sviluppo di hardware e software dei droni commerciali accessibili. La semplicità e l’automazione delle soluzioni odierne consentono ai professionisti di integrare questi robot volanti in flussi di lavoro esistenti per mappare vaste aree e generare modelli 3D ad alta risoluzione. Questi dati consentono di analizzare il mondo che ci circonda in modo più accurato e rapido rispetto ai metodi di misurazione tradizionali, come le indagini sul terreno e le misurazioni manuali. Abbiamo già mostrato come i droni possano fornire precisione del 1% nelle misurazioni del mondo reale usando i Ground Control Points (GCP).
I GCP sono punti definiti sulla superficie della terra che hanno una posizione georeferenziata nota. Utilizzando GCP in combinazione con i dati fotogrammetrici aerei, è possibile ottenere una precisione al centimetro “fissando” questi punti sulla nostra mappa aerea. Sebbene accurati, i GCP tendono a essere un processo che richiede molto tempo e spesso richiedono il posizionamento durante l’intera durata di un progetto. Quando il GPS è stato utilizzato per la prima volta negli anni 80, l’unico modo per ottenere il posizionamento sub-centimetrico con il GPS era tramite la post-elaborazione con GCP, che potrebbe richiedere giorni interi per catturare accuratamente i dati. Nei primi anni 90 è stata introdotta la tecnologia RTK (Real Time Kinematic) e gli ispettori hanno ottenuto il posizionamento a livello centimetrico in tempo reale, senza necessità di post-elaborazione.
In questo studio, DroneDeploy indaga su come convalidare e migliorare l’accuratezza delle mappe fotogrammetriche con Phantom 4 RTK (P4 RTK) di DJI, un drone che applica la tecnologia RTK alle immagini aeree. Per verificare la precisione di P4 RTK, DroneDeploy ha creato un sistema di punti di controllo per un’indagine sui tetti degli edifici.
Sono stati registrati 32 voli, ciascuno dei quali esamina l’effetto dell’altezza di volo, della sovrapposizione e del numero di immagini, sulla precisione della mappa risultante una volta che tali immagini sono state elaborate tramite il Map Engine di DroneDeploy. Questi set di dati sono stati quindi utilizzati per calcolare sia la precisione orizzontale che verticale dei punti misurati, sia l’accuratezza delle misure lineari.
DroneDeploy ha rilevato che le distanze di controllo di P4 RTK erano comprese nello 0,27% delle misurazioni dell’unità GPS, le distanze di controllo di P4 RTK erano comprese nello 0,1% del P4 Pro con le misurazioni GCP, P4 RTK ha prodotto una precisione verticale relativa di 2 cm e precisione orizzontale relativa di 1,2 cm e che i voli 2D e i voli 3D non hanno influenzato in modo significativo la precisione della misurazione.
01 Introduzione
Obiettivi di questo studio
L’obiettivo principale di questo studio è dimostrare l’elevatezza e la precisione di misurazione lineare del PK RTK rispetto ai tradizionali metodi di acquisizione basati su GPS. utilizzando un ricevitore GNSS a terra. I risultati danno un’idea della precisione che ci si può aspettare da ciascun metodo. Il set di dati risultante può anche essere utilizzato per determinare se una missione di mappatura con i droni con P4 RTK e DroneDeploy può raggiungere i requisiti di precisione del progetto.
Metodo migliore per raccolta dati accurata
In questo studio, esploreremo anche le migliori pratiche per acquisire dati estremamente precisi con il PK RTK. Questo includerà la determinazione del tipo di missione che produrrà i risultati migliori, sia in modalità di fotogrammetria 2D che in modalità di fotogrammetria 3D.
Modelli di droni utilizzati in questo studio
Il modello di drone primario utilizzato in questo studio è il DJI Phantom 4 RTK, che è stato rilasciato da DJI nell’ottobre 2018. Il drone è stato progettato per utilizzare l’elaborazione cinematica in tempo reale per produrre mappe aeree altamente accurate. Oltre all’unità RTK, il P4 RTK utilizza anche un modulo GNSS ridondante che fornisce una stabilità di volo aggiuntiva quando si vola in regioni dense con segnale RTK scadente. DJI afferma una precisione di posizionamento orizzontale RTK di 1 cm e precisione di posizionamento verticale di 1,5 centimetri RTK. In termini di misurazioni assolute su modelli fotogrammetrici, DJI afferma 5 centimetri di precisione quando si vola a 100 metri con 2,7 centimetri di GSD.
Il modulo RTK è integrato direttamente nel Phantom 4 per fornire precisione centimetrica per volo stabile e immagini con precisione georeferenziate. È stato aggiunto un nuovo sistema TimeSync per allineare continuamente il controller di volo, la telecamera e il modulo RTK, assicurando che ciascuna foto utilizzi i metadati più precisi e fissa i dati di posizionamento al centro del sensore CMOS. Questo ricevitore RTK può essere visto nella figura di seguito.

P4 RTK ha anche la possibilità di connettersi alla Mobile Station D-RTK 2, NTRIP (Network Transport of RTCM tramite Internet Protocol), o memorizzare i dati di osservazione satellitare da utilizzare per Post Processed Kinematics (PPK). La stazione mobile D-RTK 2 non è stata misurata in questo studio, invece sono stati utilizzati i metodi NTRIP descritti dettagliatamente in questo report.
DJI Phantom 4 Pro verrà utilizzato anche insieme ai GCP per fungere da dati di controllo. Questo studio utilizza i modelli DJI perché sono il più grande fornitore di hardware per droni commerciali al mondo e sono utilizzati da professionisti del settore nell’edilizia, nell’industria mineraria, nell’indagine e nelle assicurazioni. Il Phantom 4 Pro è stato dimostrato produrre le mappe fotogrammetriche più precise al momento della scrittura, rispetto ad altri modelli DJI. È il drone più popolare utilizzato dai clienti di DroneDeploy, con oltre 23.000 voli al mese.
02 Scenario
Precisione della misurazione lineare del Phantom 4 Pro
Il nostro studio precedente ha esaminato la precisione della misurazione lineare utilizzando DJI Phantom 4 Pro in combinazione con GCP. Il drone Phantom 4 RTK fa parte della serie di droni Phantom 4 e utilizza la stessa fotocamera del Phantom 4 Pro. In questo studio, abbiamo dimostrato che le misurazioni lineari relative erano accurate fino all’1,1% delle misurazioni manuali effettuate a terra. Gli errori di misurazione medi hanno mostrato che il margine di errore aumenterebbe proporzionalmente all’altitudine di volo con un coefficiente di correlazione medio di 0,42. C’è stato un miglioramento dello 0,35% nella precisione di misura per le mappe sorvolate ad un’altezza di 66 piedi rispetto a quelle sorvolate a 100, 200 o 400 piedi di elevazione. Molto di ciò può essere attribuito alla qualità delle immagini e consentire a un operatore umano di identificare il centro di tali GCPS, che può essere difficile con le mappe a bassa risoluzione.
Abbiamo riscontrato che l’elaborazione con punti di controllo a terra riduceva l’errore di misurazione medio a 0,5 pollici, un miglioramento di circa 10 volte, per tutte le lunghezze di controllo. Gli errori di misurazione per le mappe GCP hanno anche mostrato una riduzione di 10 volte simile nella deviazione standard dell’errore, il che significa che non solo i dati GCP sono più accurati, è più coerente e quindi affidabile per le applicazioni in cui è necessario un livello maggiore di precisione.
Procedure cinematiche in tempo reale (RTK) e cinematiche post-processo (PPK)
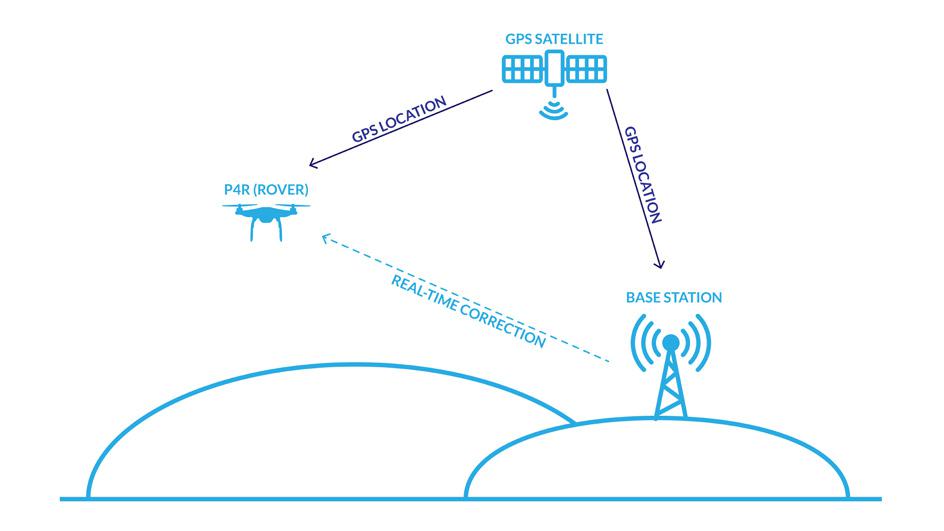
Kinematic è un termine comune utilizzato nei tradizionali metodi di rilevamento GPS in cui i ricevitori sono in movimento. Per elaborare i dati RTK, avrete bisogno sia di una stazione base RTK che di un rover RTK, in questo caso, il Phantom 4 RTK. Per il posizionamento relativo, il metodo comune utilizzato nel rilevamento è la tecnica “Stop and Go”. L’elaborazione RTK, d’altro canto, non richiede la post-elaborazione per ottenere un posizionamento accurato. Una radio al ricevitore di riferimento, una stazione base locale o una stazione base di rete, trasmette la propria posizione al rover in tempo reale. Ciò consente il rilievo sul campo ed elimina la necessità di controllare la qualità della misurazione durante la post-elaborazione. Un diagramma del flusso di lavoro RTK può essere visto in figura.
I sondaggi PPK sono simili ai sondaggi RTK, ma le posizioni non vengono corrette in tempo reale. Solitamente consiste nel posizionare una stazione base fissa su un punto di controllo noto o un monumento per consentire la geolocalizzazione. I dati GPS vengono quindi raccolti simultaneamente dalla stazione base e dal drone mentre vola. I dati vengono quindi scaricati dalla stazione base, dal rover (drone) e postati utilizzando un software GPS. Queste immagini possono quindi essere caricate sul Map Engine di DroneDeploy per l’elaborazione.
03 Metodologia
Stabilire un metodo di convalida dei dati utilizzando GCP e punti di controllo
Per testare la precisione del Phantom 4 RTK, DroneDeploy ha installato un sistema di punti di controllo sullo stesso sito di test utilizzato nello studio precedente. I punti di controllo, i GCP, le distanze di controllo e il rispettivo layout sono mostrati nella figura di seguito.
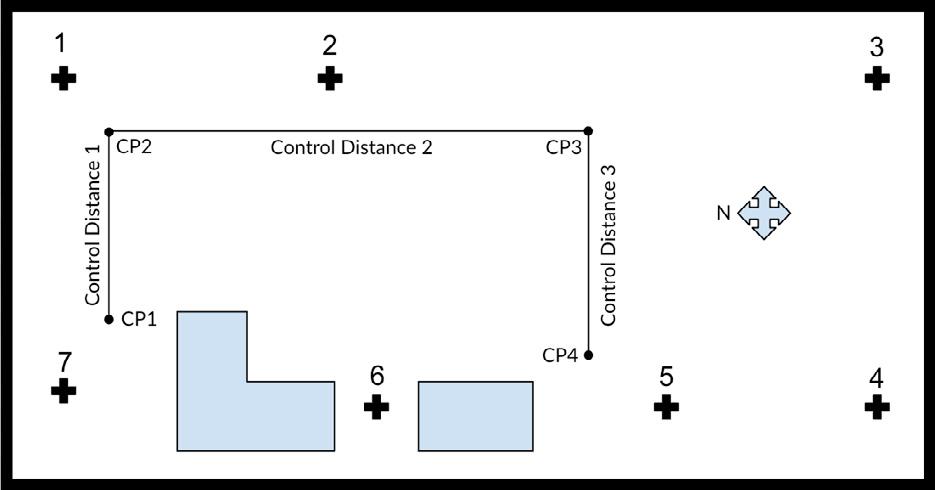
Il sistema era costituito da 7 diversi GCP 1′ x 1′ posizionati sul nostro sito di test. Questi punti sono stati posizionati a diverse altezze, latitudini e longitudini sulla superficie per essere in grado di catturare al meglio scenari diversi. Inoltre, 4 posti di blocco sono stati posizionati sul tetto e le distanze tra ciascuna sono state misurate con un metro a nastro per stabilire la lunghezza tra i punti. Sono stati quindi taggati e misurati utilizzando un’unità GPS Trimble RTX per identificare latitudine, longitudine e elevazione di ciascuno dei punti. Queste distanze di controllo dimostrano la variazione di latitudine, longitudine e elevazione tra i voli Phantom 4 Pro e P4 RTK .
Cattura di dati aerei
Per acquisire i dati aerei, DroneDeploy ha effettuato oltre 30 voli individuali utilizzando l’app DJI Phantom 4 RTK e DJI GS RTK per i voli RTK e l’app Phantom 4 Pro V2.0 e DJI GS Pro per P4 Pro con voli GCP. SmartNet, un servizio di correzione di terze parti è stato utilizzato per il controller RTK in combinazione con un hotspot mobile. SmartNet consente correzioni RTK di rete ad alta precisione e alta disponibilità per qualsiasi applicazione, utilizzando qualsiasi costellazione, pur essendo allo stesso tempo aperta a chiunque. SmartNet consente precisioni di livello centimetrico legate a un dato comune.

Un totale di 20 voli sono stati effettuati con la P4 RTK a 100 piedi sopra la superficie del tetto, in entrambe le modalità di fotogrammetria 2D e 3D e quindi elaborati con il Map Engine di DroneDeploy. Allo stesso modo, 12 voli sono stati effettuati con Phantom 4 Pro ed elaborati con GCP con il Map Engine di DroneDeploy per fungere da controllo per confrontare i risultati con. Una delle mappe aeree elaborate con checkpoint e GCP può essere vista nella Figura 5 sopra. Sono state introdotte lievi variazioni nella pianificazione del volo, nell’illuminazione e nell’altitudine per simulare un ambiente reale durante la raccolta di questi dati.
Cattura dei dati del punto di controllo del terreno per il controllo
Per acquisire i GCP per il controllo, DroneDeploy ha etichettato il centro geografico dei bersagli posizionati sul tetto con un catalizzatore Trimble. I punti mirati avevano una deviazione standard orizzontale di 0,24 cm e una deviazione standard verticale di 0,49 cm tra i 7 punti di controllo a terra e i punti di controllo contrassegnati sul sito di prova.
Questi punti sono stati utilizzati anche come punti di controllo quando si misura la precisione del PK RTK rispetto alle misurazioni GCP. Il catalizzatore Trimble, mostrato in figura di seguito, è stato scelto a causa della sua semplicità, basso costo e prestazioni GNSS altamente accurate. In uno studio indipendente condotto da Geo Job UAV all’inizio del 2018, hanno dedotto: “Le coordinate del catalizzatore erano comprese tra 0,25 pollici e meno di 1 pollice dei risultati del geometra”. Grazie alla sua integrazione con il software Trimble UAV Ground Control, ha anche fornito un modo semplice per acquisire i dati dei punti di controllo da utilizzare con le soluzioni UAV.

Trimble Catalyst è un posizionamento RTK GNSS ‘as a service’ e può essere utilizzato con qualsiasi smartphone Android mainstream moderno. La configurazione hardware consiste in qualsiasi dispositivo Android moderno, l’antenna DA1 di Trimble Catalyst e un polo di rilevamento standard. Lo smartphone viene utilizzato al posto di un datalogger tradizionale ed è collegato all’antenna tramite il cavo USB in dotazione.
Anziché utilizzare un chip GPS “hardware”, Catalyst utilizza un ricevitore GNSS interamente definito dal software; le posizioni vengono calcolate nel software, utilizzando il processore dello smartphone, riducendo le dimensioni, il peso e le richieste di alimentazione della batteria dell’intero sistema. Il catalizzatore funziona a 2-3m senza costi di account ricorrenti, ma le precisioni fino a 1-2 cm sono facilmente ottenibili con un abbonamento mensile (che sblocca le modalità ad alta precisione del ricevitore e accelera l’accesso al VRS localizzato di Trimble Now e servizi di correzione Trimble RTX globali senza costi aggiuntivi). Per controllare il ricevitore, è necessario installare due app da Google Play Store, Trimble Mobile Manager e una qualsiasi delle applicazioni create appositamente, nel nostro caso, il software Trimble UAV Ground Control.
Grazie alla sua semplicità, alto livello di accuratezza e accettazione da parte della base clienti di DroneDeploy, siamo stati in grado di utilizzare Trimble Catalyst per garantire con sicurezza la precisione di validazione rispetto a P4 RTK. Raccomandiamo l’uso di un ricevitore GNSS ad alta precisione, come Catalyst, durante l’elaborazione delle mappe con DroneDeploy per verificare l’accuratezza delle mappe sul tuo sito di lavoro per l’auditing e la sicurezza.
04 Risultati chiave
P4 RTK ha fornito una precisione verticale relativa di 2 cm e una precisione orizzontale relativa di 1,2 cm
Ciascuno dei 4 punti di controllo è stato taggato e misurato con l’unità GPS Trimble. La seguente tabella 3 mostra la precisione verticale dei punti di controllo, sia nella mappa elaborata RTK che nella mappa P4 Pro con GCP. L’errore dell’unità GPS viene mostrato per comprendere l’errore di misurazione verticale del Trimble Catalyst. Circa 30 misurazioni sono state catturate e calcolate una media per ogni GCP e checkpoint.
Da queste misurazioni, otteniamo una precisione verticale relativa di circa 3,3 cm e una precisione orizzontale relativa di 2,01 cm. La precisione verticale relativa relativa di tutti i punti di controllo nella mappa P4 RTK era di 2,00 cm. La precisione verticale relativa relativa di P4 Pro con GCPs, per il confronto è risultata di 1,95 cm.

Tabella 3. Confronto dell’accuratezza verticale di P4 RTK rispetto a P4 Pro con le misurazioni GCP
Con P4 RTK, abbiamo ottenuto una precisione orizzontale relativa di 1,20 cm. Con P4 Pro e GCPs, abbiamo ottenuto una precisione orizzontale relativa di 0,90 cm. In questo studio, abbiamo dimostrato che la P4 RTK può raggiungere una precisione verticale relativa di 2,00 cm e una precisione orizzontale relativa di 1,20 cm quando viene portata a 33 piedi (100 piedi). È anche importante notare che le misure di accuratezza per P4 RTK sono state prese utilizzando gli strumenti di annotazione e misurazione di DroneDeploy. Il GSD per le mappe risultanti è in media 0.4in/px.
Perché questo è importante?
Determinare elevazioni accurate è una parte essenziale di molti progetti di costruzione civili come strade, ponti e progetti autostradali. Linee di drenaggio, strutture di drenaggio e altre caratteristiche di autostrada sono progettate con piani di base noti e esistenti, elevazioni finali o piani di progettazione. Le sezioni trasversali preliminari e finali determinano anche le quantità volumetriche. Inoltre, elevazioni accurate sono fondamentali per garantire l’affidabilità della mappatura fotogrammetrica e dei prodotti ortofoto all’interno di DroneDeploy e di altri software fotogrammetrici.
Data la sua importanza in tutte le altre fasi dello sviluppo del progetto, le misurazioni verticali sono stabilite in un punto di controllo, noto come GCP. A causa del considerevole effetto a valle delle misurazioni verticali inaccurate, questo è un componente critico della pre-costruzione e la riduzione dell’errore risultante è della massima importanza.
P4 RTK Distanze di controllo entro lo 0,1% di P4 Pro con misure GCP
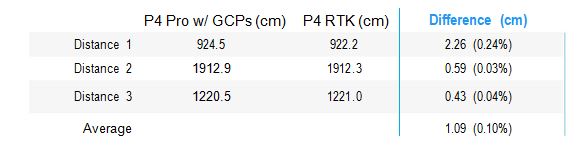
Nell’accuratezza della misurazione lineare delle piattaforme DJI Drone Platforms e Photogrammetry, abbiamo dimostrato che l’utilizzo di un Phantom 4 Pro con GCP produrrebbe un margine di errore di circa lo 0,64%. Usando un RTK Phantom 4, siamo stati in grado di produrre un margine di errore di circa lo 0,27% rispetto alle misurazioni del “mondo reale”. Nella Tabella 2, confrontiamo la precisione del PK RTK con il P4 Pro. In media, le misure P4 RTK sono entro 1,09 cm, o 0,10%, delle misurazioni P4 Pro elaborate con GCP. Questi risultati mostrano che usando un drone Phantom 4 RTK, un utente può aspettarsi una precisione media di 1,09 cm sulle mappe elaborate RTK in DroneDeploy, se confrontato con mappe simili utilizzate con Phantom 4 Pro ed elaborate con GCP.
Perché questo è importante?
L’accuratezza della misurazione lineare è una metrica importante da considerare a causa delle sue applicazioni reali. Mentre può essere importante esaminare l’accuratezza orizzontale e verticale di un singolo punto, molti progetti di costruzione civile guardano alle linee di livello, al drenaggio lungo una strada, alla volumetrica delle scorte o all’area dei materiali, tutti basati sull’accuratezza del punto- misure da punto a punto.
Questo processo implica la comprensione del cambiamento di accuratezza quando si misura la variazione tra i punti. Ad esempio, una precisione orizzontale o verticale di ± 2 cm potrebbe equivalere a una precisione di misurazione lineare di ± 4 cm tra 2 punti. Ciò fornisce una comprensione più tangibile di come l’accuratezza potrebbe influenzare le misure di una strada, un ponte, un’autostrada o un altro progetto di costruzione civile.
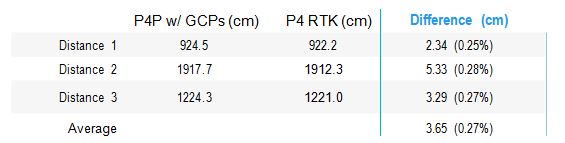
Distanze di controllo P4 RTK all’interno dello 0,27% delle misure del catalizzatore Trimble
Una volta elaborate le mappe P4 RTK all’interno di DroneDeploy, le distanze di controllo sono state codificate e misurate su tutte le mappe utilizzando gli strumenti di misurazione di DroneDeploy. Il confronto tra le misure della mappa RTK P4 e le misurazioni del mondo reale può essere visto nella Tabella 1 qui sotto. L’errore medio per le mappe P4 RTK è arrivato a 3,65 cm, o circa lo 0,27% delle misurazioni nel mondo reale. Per fare un confronto, usando GCP un utente può aspettarsi una precisione di 3 cm, e usando un’unità GPS, come un catalizzatore Trimble, un utente può aspettarsi una precisione di 3 cm.
Guardando solo la precisione XY dei punti di controllo, il P4 RTK offre una precisione orizzontale relativa di 1,2 cm. Questi risultati mostrano che utilizzando un drone Phantom 4 RTK, un utente può aspettarsi, in media, una precisione di misurazione lineare di 3,65 cm su mappe elaborate RTK in DroneDeploy. Nota: le misure del mondo reale sono state prese utilizzando un metro a nastro.
I voli 2D e 3D non hanno influito in modo significativo sulla precisione delle misurazioni
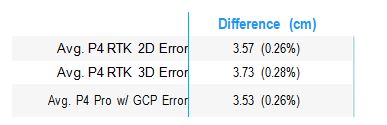
Un totale di cinque 2D e cinque voli di fotogrammetria 3D sono stati volati utilizzando l’app DJI GSR con P4 RTK. I risultati di questo studio possono essere visualizzati nella Tabella 4 di seguito. L’errore di misurazione lineare medio per i voli 2D è stato di circa 3,57 cm o 0,26%. L’errore di misurazione lineare medio per i voli 3D è stato di circa 3,73 cm o 0,28%. L’errore di misura lineare medio per i voli P4 Pro era di circa 3,53 cm o 0,26%. A 0,16 cm di margine di errore tra i voli 2D e 3D, non abbiamo una variazione statisticamente significativa nella precisione della misurazione lineare. Quando si vola su P4 RTK per missioni ad alta precisione, la scelta di 2D o 3D dipenderà dalle esigenze dell’utente, dal 2D in volo per terreni relativamente pianeggianti e dal volo 3D per strutture, edifici o altri oggetti alti.
05 Conclusione
L’accuratezza della misurazione di Phantom 4 RTK è in grado di soddisfare i requisiti di livello topografico
Il grado di accuratezza che ci si aspetterebbe da determinati progetti dipende dall’applicazione finale e dall’uso previsto dei dati dell’indagine. La precisione accettabile potrebbe essere di 30 cm o più lontano dalla posizione rilevata. In alcuni progetti, l’errore massimo accettabile potrebbe essere di 5-7 cm o inferiore. Secondo il comitato del sistema di navigazione satellitare globale USGS, è responsabilità del geometra conoscere i requisiti di accuratezza del sondaggio e farlo corrispondere alla precisione del suo ricevitore in combinazione con l’accuratezza delle informazioni di correzione ricevute in base alla qualità e alla posizione della correzione .
Oggi le aziende possono ottenere un’accuratezza orizzontale inferiore di 3 cm utilizzando metodi di rilevamento tradizionali. Questi consentono loro di eseguire sondaggi accurati, offerte, operazioni di classificazione e gestione di progetti su larga scala con facilità. La maggior parte delle mappe del grado di rilevamento fornisce tradizionalmente una precisione inferiore a 3 cm nella direzione XY e una precisione di circa 9 cm nella direzione Z. In questo studio, abbiamo dimostrato che l’RTK Phantom 4 può fornire una precisione verticale relativa di 2 cm e una precisione orizzontale relativa di 1,20 cm con le mappe elaborate su DroneDeploy Map Engine (in media).
Sulla base di questi risultati, DroneDeploy consiglia di utilizzare Phantom 4 RTK per creare mappe accurate per la misurazione delle distanze da punto a punto. Non solo è possibile ottenere risultati accurati, ma nella maggior parte dei casi l’utilizzo del Phantom 4 RTK per il rilevamento ridurrà i costi associati ai metodi tradizionali, compresi quelli spesi per manodopera, hardware e software. Ciò si traduce anche con i vantaggi generali che i nostri clienti ottengono, come una maggiore produttività, tempi di analisi più rapidi, una migliore collaborazione e una maggiore sicurezza sul posto di lavoro. Tuttavia, l’uso di alcuni punti di controllo di controllo a terra (GCP 1-2) è ancora raccomandato per garantire l’accuratezza e fornire la responsabilità per qualsiasi misura.

 https://www.instagram.com/3digital.tech/
https://www.instagram.com/3digital.tech/