

Analisi di 3DMakerPro Raven: lo scanner LiDAR da 1229€ — Specifiche, prezzi e confronto
Il mercato degli scanner LiDAR portatili è appena diventato molto più interessante. 3DMakerPro ha lanciato ufficialmente Raven e, con un prezzo early bird a partire da 1229€+iva, sta surclassando di gran lunga qualsiasi scanner LiDAR/SLAM standalone sul mercato. Ma un prezzo basso conta solo se l'hardware è all'altezza.
Ecco un'analisi approfondita delle specifiche e del posizionamento della Raven nella gamma di 3DMakerPro. Confrontiamo il suo posizionamento con la concorrenza di FJD Trion, SHARE e altri. Analizziamo inoltre ciò che la community segnala già come potenziali problemi.
Che cos'è 3DMakerPro Raven?
Raven è lo scanner spaziale LiDAR entry-level di 3DMakerPro. È un'alternativa più piccola, leggera e notevolmente più economica all'attuale Eagle (lanciato all'inizio del 2025) e all'Hawk di livello professionale.
Considerando il progresso di 3DMakerPro dagli scanner per oggetti a luce strutturata (talpa, foca, alce) al territorio del LiDAR spaziale con Eagle, Raven rappresenta il logico passo successivo. L'obiettivo è portare la scansione LiDAR portatile autonoma a un prezzo accessibile. Hobbisti, creatori di contenuti e piccole imprese possano così realisticamente giustificarne l'acquisto.
Il dispositivo è stato avvistato per la prima volta al Formnext 2024. Le prime impressioni pratiche lo facevano sembrare una versione compatta dell'Hawk, con uno slot di espansione RTK, un touchscreen e un prezzo indicativo di 999 dollari. Questi primi dettagli sono stati ora confermati dalla scheda tecnica ufficiale. Le fasce di prezzo corrispondono a quanto riportato sulla pagina dello store 3DMakerPro.

Per chi non ha familiarità con il flusso di lavoro di scansione di 3DMakerPro, i video sullo scanner Eagle offrono una buona panoramica della pipeline del software RayStudio. Mostrano il processo di scansione e la qualità di output generale che ci si può aspettare. Raven condivide lo stesso ecosistema software e gli stessi formati di output. Queste esercitazioni forniscono quindi un contesto direttamente pertinente per l'esperienza d'uso di Raven.
Specifiche di 3DMakerPro Raven
Dalla scheda tecnica pubblicata da 3DMakerPro :
Precisione: 2 cm a 10 m, 3 cm a 20 m, 5 cm a 40 m
Portata di rilevamento LiDAR: 40 m al 10% di riflettività / 50 m all'80% di riflettività
Copertura massima della scansione: 80–100 m (Nota: 3DMakerPro elenca questo come "intervallo di scansione" — vedere la spiegazione di seguito)
Campo visivo: 360° orizzontale × 40° verticale
Frequenza della nuvola di punti: 150.000 pts/sec
Laser: 905 nm, Classe 1 sicuro per gli occhi (IEC60825-1:2014)
Fotocamera: 12 MP, 1 fotocamera o (sistema a 2 fotocamere per la versione MAX)
Modalità HDR: No
Schermo: 3,9" AMOLED
Batteria: 12.000 mAh — circa 2 ore di lavoro, supporta l'alimentazione esterna durante la ricarica
Peso: 1,1 kg
Dimensioni: 148 × 288 × 98 mm
Elaborazione integrata: 8 core, 2,4 GHz, 32 GB di memoria (espandibile tramite scheda TF)
Interfaccia dati: USB-C ×1
Alimentazione: USB-C ×1
Rete: Wi-Fi 5
Formati di output: nuvola di punti a colori 3D PLY, splatting gaussiano 3D PLY, modello poligonale colorato 3D OBJ
Espansione: kit di espansione RTK, kit di espansione Insta360 X4/X5, vari accessori
Una nota su "Intervallo di scansione" e "Raggio di scansione" in 3DMakerPro Raven: leggi questo prima di confrontare
Questo è un dettaglio che può creare confusione quando si confrontano gli scanner LiDAR e vale la pena precisarlo. 3DMakerPro utilizza due specifiche distinte che sembrano simili ma significano cose diverse: il "raggio di scansione" è la distanza di rilevamento del LiDAR. Indica la distanza a cui il laser può rilevare una superficie dal dispositivo. Il "raggio di scansione" è approssimativamente il diametro di copertura totale, circa due volte il raggio. Quando 3DMakerPro afferma che Eagle ha un "raggio di scansione di 140 m", ciò corrisponde a un raggio di rilevamento di 70 m.
FJD Trion, SHARE e Livox specificano tutti il "raggio di scansione" come distanza di rilevamento, equivalente a quello che 3DMakerPro chiama "raggio di scansione". Un confronto diretto tra la "portata di 140 m" di 3DMakerPro e la "portata di 70 m" di FJD è quindi fuorviante. In realtà descrivono la stessa capacità del sensore. Ogni confronto in questo articolo utilizza la metrica coerente della portata di rilevamento LiDAR, cioè la distanza raggiunta dal sensore all'80% di riflettività superficiale, salvo diversa indicazione.
Prezzi di 3DMakerPro Raven
È qui che entra in gioco Raven. Al lancio sono disponibili quattro configurazioni, a prezzi scontati:
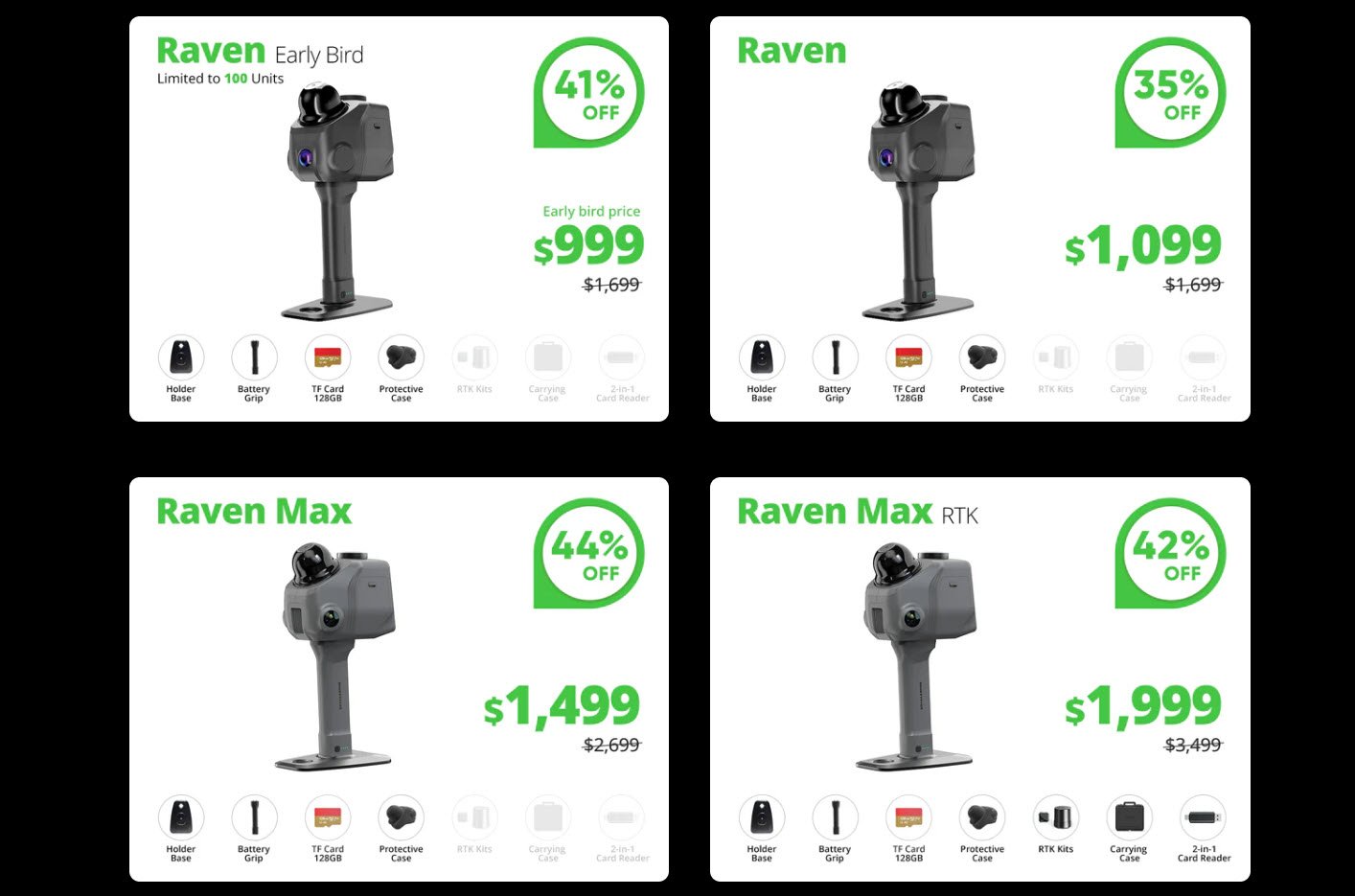
| Variante | Inclusioni chiave | ||
| Corvo Mattiniero | Base di supporto, impugnatura della batteria, scheda TF da 128 GB, custodia protettiva | ||
| Corvo | Come sopra | ||
| Raven Max | Aggiunge kit RTK, custodia per il trasporto, lettore di schede 2 in 1 | ||
| Raven Max RTK | Kit completo con RTK, custodia per il trasporto, lettore di schede |
Raven vs Eagle vs Hawk vs FJD Trion vs SHARE: Confronto completo
Ecco il confronto tra gli attuali scanner LiDAR/SLAM portatili. Tutti i valori di portata LiDAR utilizzano una distanza di rilevamento all'80% di riflettività per un confronto coerente. Per i dettagli, vedere la nota sulla portata di scansione rispetto al raggio sopra.
| Specifiche | Corvo | Aquila | Falco | FJD P2 | FJD V4e | CONDIVIDI S20 SE | CONDIVIDI C1 |
| Precisione | 2 cm a 10 m | 2 cm a 10 m | 1,5 cm a 10 m | palo da 1,2 cm | palo da 3 cm | ≤1cm rel. | <1cm |
| Portata LiDAR* | 50 metri | 70 metri | 70 metri | 70 metri | 50 metri | 70 metri | 70 metri |
| Punti/sec | 150mila | 200mila | 480 mila | 200mila | 154 mila | 200mila | 200mila |
| Campo visivo verticale | 40° | 59° | 63,5° | 59° | ~70° | 59° | ~59° |
| Telecamera | 12 MP (1-2) | 48 MP (1-4) | 13 MP 1" | 2x12MP | Telefono | 2x2,3 MP | Doppia larghezza |
| HDR | NO | 8K HDR | SÌ | NO | NO | NO | NO |
| Peso | 1,1 kg | 1,5 kg | ~0,9 kg | 0,7 kg | 0,89 kg | 0,955 kg | ~0,575 kg |
| Batteria | ~2 ore | ~1 ora | ~1 ora di scambio | ~4 ore | 5+ ore | ~3 ore | ~3 ore |
| RTK | Opzionale | Opzionale | Incorporato | Opzionale | Incorporato | Opzionale | NO |
| Autonomo | SÌ | SÌ | SÌ | SÌ | No (telefono) | No (telefono) | No (telefono) |
| Gauss. Schianto | SÌ | SÌ | SÌ | SÌ | SÌ | SÌ | In arrivo |
| Prezzo | $999-1.999 | ~$3.399+ | ~$8.999+ | ~$4.000+ | ~$4.299 | ~$4.499+ | $ 3.999 (KS) |
*Portata LiDAR = distanza di rilevamento all'80% di riflettività superficiale. 3DMakerPro commercializza Eagle con "portata di scansione di 140 m" e Raven con "portata di scansione di 100 m". Queste cifre rappresentano il diametro di copertura totale, circa due volte la distanza di rilevamento. Non sono quindi paragonabili alle specifiche di "portata di scansione" di FJD o SHARE. Questa tabella utilizza la metrica di distanza di rilevamento coerente.
Capire il sensore LiDAR: perché è importante
La comunità sta prestando molta attenzione al sensore LiDAR utilizzato dal Raven e per una buona ragione. Si può sostenere che questo sia il componente più importante in qualsiasi scanner SLAM.
Il Livox Mid-360 è diventato di fatto il sensore standard in questa classe di scanner SLAM portatili. Prodotto da Livox, una sussidiaria di DJI, è un'unità compatta con un campo visivo di 360° × 59°. Offre 200.000 punti al secondo e una comprovata portata di rilevamento di 70 m con riflettività dell'80%.
Di fondamentale importanza è il suo ampio supporto all'algoritmo SLAM nella comunità robotica open source. Include il sistema di odometria LIO-Livox di Livox. Vanta inoltre una solida esperienza in applicazioni professionali di rilevamento e mappatura. Numerosi studi accademici ne hanno convalidato l'accuratezza geometrica. Secondo le specifiche di 3DMakerPro, l'Eagle utilizza questa classe di sensori. Gli FJD Trion P1 e P2 utilizzano sensori con specifiche corrispondenti, 200.000 punti/s, campo visivo 360° × 59° e portata 70 m. SHARE ha confermato che l'S20/S20 SE utilizza direttamente il Mid-360, come documentato sulla pagina vetrina di Livox.
Le specifiche pubblicate del Raven – 150.000 punti/s, campo visivo verticale di 360° × 40°, raggio di rilevamento di 50 m – indicano chiaramente che non utilizza un Livox Mid-360. Il campo visivo verticale più stretto, 40° contro 59°, è la differenza più significativa nella pratica. Significa che il Raven cattura meno dettagli ambientali per passaggio, in particolare sull'asse verticale. La scansione di strutture alte richiederà più passaggi sovrapposti e tempo aggiuntivo. Anche l'acquisizione di soffitti in scansioni interne o il lavoro in spazi ristretti richiederanno più passaggi. La minore densità di punti, 150k contro 200k, si traduce in un livello di dettaglio leggermente inferiore al secondo. Questa limitazione è comunque meno significativa della riduzione del campo visivo.
Questo non è necessariamente un fattore decisivo, dato che è grazie a un sensore più economico che 3DMakerPro raggiunge il prezzo di 999 $. Tuttavia è un compromesso importante che dovresti comprendere prima dell'acquisto.
Il sensore LiDAR influisce direttamente sulla densità della nuvola di punti e sulla resistenza alla deriva SLAM. Incide anche sull'affidabilità della scansione in ambienti difficili. I membri della community nei gruppi Facebook Raven ed Eagle di 3DMakerPro hanno segnalato questa come la loro preoccupazione principale. Si tratta di una preoccupazione legittima.
3DMakerPro non ha rivelato pubblicamente il produttore o il modello del sensore Raven (almeno per quanto ne so).
Un'ulteriore lacuna è rappresentata dalle specifiche mancanti dell'IMU. L'IMU, unità di misura inerziale, è fondamentale per la stabilità dello SLAM e il controllo della deriva. Ciò è particolarmente vero in ambienti privi di caratteristiche, come lunghi corridoi, campi aperti o tunnel.

Modulo sensore Livox Mid-360.
Cosa distingue 3DMakerPro Raven
Il prezzo è davvero dirompente. A un prezzo compreso tra 999 e 1.099 dollari per il Raven base, si ottiene uno scanner LiDAR autonomo con touchscreen AMOLED, elaborazione integrata e output splatting gaussiano. Non serve alcun telefono durante la scansione. Non serve nemmeno un laptop o un tethering. Il kit LiDAR FJD Trion V4e è il concorrente più vicino a livello economico nel mercato degli scanner SLAM portatili. Richiede però un iPhone 15+ e costa oltre 4.000 dollari, attualmente 4.299 dollari in offerta da 4.799. SHARE C1 si rivolge a un pubblico prosumer simile tramite Kickstarter. Tuttavia il prezzo di vendita definitivo e i tempi di consegna non sono ancora stati definiti.
Due ore di autonomia della batteria rappresentano un vantaggio significativo rispetto all'ora circa di Eagle, secondo le specifiche di 3DMakerPro, che indicano 60 minuti per Eagle. È possibile scansionare realisticamente un intero edificio, sia all'interno che all'esterno, senza bisogno di un power bank. Raven supporta anche l'alimentazione esterna durante la scansione, caratteristica pratica se accidentalmente lo si lascia scarico.
L'espansione Insta360 X4/X5 e RTK consente a Raven di adattarsi a più scenari d'uso. Chi è interessato a gestire i propri flussi di lavoro utilizzando Insta360 per lo splatting gaussiano e RTK/PPK dispone di percorsi di aggiornamento personalizzati. Apprezzo il modo in cui questo approccio mantiene bassi i costi di ingresso. Allo stesso tempo lascia spazio per flussi di lavoro più professionali.
È completamente autonomo. A differenza dell'FJD V4e, che richiede un iPhone 15+, e dell'FJD P2, che necessita di uno smartphone o tablet per il monitoraggio in tempo reale tramite l'app FJD Trion Scan, Raven funziona in modo completamente indipendente. La linea SHARE S20/C1 richiede invece l'app SHARE Capture. Raven è autonomo grazie al suo schermo AMOLED da 3,9" integrato e alla memoria interna. Per l'uso sul campo in luoghi remoti questo è fondamentale. È altrettanto importante per gli utenti che desiderano un flusso di lavoro più semplice e immediato.
Dove sono le preoccupazioni
Il sensore LiDAR rappresenta un netto passo indietro rispetto alla concorrenza. Come descritto in precedenza, i 150.000 punti/s del Raven, il campo visivo verticale di 40° e la portata di rilevamento di 50 m lo pongono al di sotto di tutti gli altri scanner LiDAR in questo confronto. La copertura verticale più ristretta comporta un maggior numero di passaggi di scansione in ambienti complessi. Può anche causare un aggancio SLAM potenzialmente più debole in spazi con variazioni verticali.
I membri della community nei gruppi di utenti 3DMakerPro Raven ed Eagle su Facebook hanno espresso apertamente questa preoccupazione. Il sensore sembra essere un'unità di qualità inferiore, pensata per applicazioni di fascia bassa. Per flussi di lavoro in cui le prestazioni del laser sono più importanti della fotocamera, questo rappresenta un chiaro compromesso.
Nessuna specifica IMU pubblicata. L'IMU è essenziale per la stabilità SLAM e il controllo della deriva, e gli utenti esperti ne hanno segnalato l'assenza. Ma questo significa che non ne usano una (o che semplicemente non è molto efficace), chissà.
I precedenti del software 3DMakerPro non sono dei migliori. Avendo trascorso molto tempo con Eagle Max e RayStudio, questo è un aspetto in cui le aspettative devono essere realistiche. Eagle è stato lanciato all'inizio del 2025 con un'ambiziosa roadmap software. L'elaborazione Gaussian Splatting era prevista per il 10 aprile 2025. La creazione di mesh di nuvole di punti era prevista per il 15 aprile. Lo stitching di immagini panoramiche era pianificato per il 30 aprile, secondo la pagina tutorial di RayStudio di 3DMakerPro. In pratica, le funzionalità sono arrivate molto più tardi del previsto. Le recensioni indipendenti, incluso un test dettagliato di 3Printr.com, hanno costantemente descritto RayStudio come funzionale ma non ancora maturo.
I problemi di stabilità, in particolare su macOS, sono stati ampiamente documentati. Il flusso di lavoro di post-elaborazione richiede ancora pazienza. Il software è migliorato nell'ultimo anno, ma è stato un processo lento. Poiché Raven condivide lo stesso ecosistema software, dovremmo aspettarci una traiettoria simile. Non possiamo ancora parlare di un'esperienza "beta-tester" completamente rifinita.
Speriamo solo che Eagle e Hawk abbiano fatto i progressi necessari per rendere Raven un lancio migliore!

Philipp Kreiser (PrinterForFun) esprime scetticismo nei confronti del sensore Lidar e della scansione iniziale.
RTK = tempo reale o solo post-elaborazione? La questione rimane piuttosto confusa per quanto riguarda la linea di prodotti 3DMakerPro. Le FAQ ufficiali di Eagle descrivono l'RTK come posizionamento cinematico in tempo reale. Il tutorial sul flusso di lavoro di RayStudio sul blog di 3DMakerPro mostra però che i dati RTK vengono applicati come fase di post-elaborazione. Indica infatti di "selezionare l'opzione RTK nelle fasi di elaborazione".
I resoconti dei membri della community sono contrastanti. Alcuni dubitano che la vera correzione RTK in tempo reale funzioni in modo affidabile. Rimane il sospetto che si tratti effettivamente di PPK, cioè cinematica post-elaborata.
Se la precisione georeferenziata è importante per il tuo flusso di lavoro, vale la pena verificarlo con recensioni di utenti reali. Spero di poterti fornire un'unità da recensire prima che ti impegni con il kit RTK di Raven.
A titolo di confronto, sia la linea FJD Trion che la SHARE S20 RTK offrono flussi di lavoro RTK in tempo reale ben documentati. Dispongono inoltre di specifiche di precisione comprovate, ma a fasce di prezzo piuttosto diverse.
I primi campioni di scansione non sono stati impressionanti. Il video di presentazione di Philipp Kreiser, PrintedForFun / 3D Scanning Users Group, ha evidenziato che le prime scansioni Raven pubblicate non sembravano particolarmente convincenti. L'hardware pre-rilascio migliorerà con aggiornamenti firmware e software. Tuttavia al momento sono disponibili dati di scansione indipendenti limitati per valutare le prestazioni reali.
Le fotocamere da 12 MP senza HDR significano che le nuvole di punti colorate e le scene con Gaussian Splatting non eguaglieranno la qualità visiva dell'Eagle. Quest'ultimo utilizza fotocamere da 48 MP con uscita HDR 8K. Non raggiungeranno nemmeno la qualità delle doppie fotocamere da 1 pollice da 16 MP con otturatori meccanici dello SHARE S20. Dove la fedeltà visiva è importante, come tour virtuali o Gaussian Splatting di qualità da presentazione, questo rappresenta un evidente peggioramento. Lo stesso vale per le visite guidate immobiliari.
A chi è rivolto in realtà il corvo?
Il Raven si posiziona decisamente come un dispositivo di accesso al mondo della scansione LiDAR portatile. I suoi obiettivi sono:
Per chi passa da iPhone o iPad al LiDAR. Se hai utilizzato Polycam, SiteScape o Scaniverse con il LiDAR integrato nel tuo telefono e hai raggiunto il limite massimo di ciò che questi strumenti possono fare, Raven rappresenta un enorme passo avanti. Migliora in termini di portata, volume di scansione, densità di punti e flusso di lavoro. Offre inoltre un prezzo che non richiede severe giustificazioni professionali.
Appassionati, maker e creatori di contenuti che desiderano catturare stanze, edifici o ambienti esterni per progetti personali, creazione di risorse di gioco, esperimenti di splatting gaussiano o documentazione sono il pubblico ideale. Il flusso di lavoro autonomo e il prezzo di ingresso inferiore a 1.000 dollari rendono questo scanner un acquisto quasi impulsivo. Nessun altro scanner LiDAR portatile è mai stato così accessibile.
Le piccole imprese che desiderano esplorare tour virtuali e documentazione spaziale possono farlo senza dover acquistare attrezzature di rilevamento professionali. Agenti immobiliari, location per eventi e imprese di ristrutturazione potrebbero trovare Raven un livello di acquisizione spaziale "sufficiente" per applicazioni non critiche.
Per geometri professionisti, architetti o chiunque si occupi di BIM/CAD: il Raven probabilmente non è lo strumento adatto. L'FJD Trion P2 offre una precisione post-processata di 1,2 cm, fusione multi-SLAM e tecnologia HyperDense+. Include inoltre doppia fotocamera da 12 MP ed ecosistema software FJD Trion collaudato. Lo SHARE S20 offre precisione relativa ≤1 cm e sensore Livox Mid-360 confermato. Ha anche doppia fotocamera da 1 pollice da 16 MP con otturatori meccanici. Il 3DMakerPro Hawk dichiara una precisione di 1,5 cm a 10 m e 480.000 punti/s con LiDAR multi-eco. Offre inoltre grado di protezione IP65. Tutti questi sistemi sono significativamente più performanti del Raven, sebbene a prezzi corrispondentemente più elevati.
La conclusione
3DMakerPro Raven fa qualcosa che nessun altro scanner LiDAR portatile autonomo ha mai fatto. Rende la tecnologia accessibile a meno di 1.000 dollari. I compromessi sono reali e già documentati. Il sensore LiDAR ha specifiche inferiori e un campo visivo più stretto. La portata di rilevamento è ridotta e le fotocamere sono più semplici, senza HDR. L'ecosistema software è ancora in fase di maturazione. Tuttavia la proposta di valore a questo prezzo è difficile da ignorare.
La domanda non è se il Raven sia migliore di uno scanner da oltre 4.000 dollari. Non lo è. La vera domanda è se sia abbastanza valido da aprire le porte a una nuova generazione di utenti. Parliamo di persone che non avrebbero mai preso in considerazione la scansione LiDAR prima. In base alle specifiche, al prezzo e al percorso di espansione, la risposta è probabilmente sì. Serve però l'avvertenza che è necessario avere aspettative realistiche. Bisogna considerare il perfezionamento del software e la qualità di scansione rispetto alla concorrenza consolidata.

 https://www.instagram.com/3digital.tech/
https://www.instagram.com/3digital.tech/