
Accuracy of DJI Phantom 4 RTK measurement and photogrammetry
Summary
In recent years, unmanned aerial vehicles (UAVs), commonly known as drones, have increasingly become a popular tool for collecting aerial data in construction, surveying, mining and insurance. Using photogrammetry, these industries capture aerial images and generate valuable information from large data sets, making it possible to see and measure changes that occur over time in construction sites, mines and properties.
Photogrammetry is not a new science and was used for topographic mapping, architecture and engineering long before the advent of drones. But the rise of computer vision-based photogrammetry in recent years has paralleled the development of affordable commercial drone hardware and software. The simplicity and automation of today's solutions allow professionals to integrate these flying robots into existing workflows to map large areas and generate high-resolution 3D models. This data allows us to analyze the world around us more accurately and quickly than traditional measurement methods, such as field surveys and manual measurements. We've already shown how drones can provide 1% accuracy in real-world measurements using Ground Control Points (GCPs).
GCPs are defined points on the surface of the earth that have a known georeferenced location. By using GCP in combination with aerial photogrammetric data, centimeter accuracy can be achieved by “pinning” these points on our aerial map. While accurate, GCPs tend to be a time-consuming process and often require placement throughout the life of a project. When GPS was first used in the 1980s, the only way to achieve sub-centimeter positioning with GPS was through post-processing with GCP, which could take days to accurately capture the data. In the early 1990s, RTK (Real Time Kinematic) technology was introduced and inspectors achieved centimeter-level positioning in real time, with no post-processing required.
In this study, DroneDeploy investigates how to validate and improve the accuracy of photogrammetric maps with Phantom 4 RTK (P4 RTK) by DJI, a drone that applies RTK technology to aerial imagery. To verify the accuracy of the P4 RTK, DroneDeploy created a control point system for a survey of building roofs.
32 flights were recorded, each examining the effect of flight height, overlap and number of images on the resulting map accuracy once those images were processed via DroneDeploy's Map Engine. These datasets were then used to calculate both the horizontal and vertical accuracy of the measured points, as well as the accuracy of the linear measurements.
DroneDeploy found that P4 RTK control distances were within 0.27% of GPS unit measurements, P4 RTK control distances were within 0.1% of P4 Pro with GCP measurements, P4 RTK has produced a relative vertical accuracy of 2 cm and a relative horizontal accuracy of 1.2 cm and that 2D flights and 3D flights did not significantly affect the accuracy of the measurement.
01 Introduction
Objectives of this study
The main objective of this study is to demonstrate the high and linear measurement accuracy of PK RTK compared to traditional GPS-based acquisition methods. using a grounded GNSS receiver. The results give an idea of the accuracy that can be expected from each method. The resulting dataset can also be used to determine if a mapping mission with drones with P4 RTK and DroneDeploy can meet the accuracy requirements of the project.
Best method for accurate data collection
In this study, we will also explore best practices for acquiring highly accurate data with the PK RTK. This will include determining the type of mission that will produce the best results, in both 2D photogrammetry mode and 3D photogrammetry mode.
Drone models used in this study
The primary drone model used in this study is the DJI Phantom 4 RTK , which was released by DJI in October 2018. The drone was designed to use real-time kinematic processing to produce highly accurate aerial maps. In addition to the RTK unit, the P4 RTK also uses a redundant GNSS module which provides additional flight stability when flying in dense regions with poor RTK signal. DJI claims 1cm RTK horizontal positioning accuracy and 1.5cm RTK vertical positioning accuracy. In terms of absolute measurements on photogrammetric models, DJI claims 5 centimeters of accuracy when flying 100 meters with 2.7 centimeters of GSD.
The RTK module is integrated directly into the Phantom 4 to provide centimeter accuracy for stable flight and accurately geotagged images. A new TimeSync system has been added to continuously align the flight controller, camera and RTK module, ensuring that each photo uses the most accurate metadata and fixes the positioning data to the center of the CMOS sensor. This RTK receiver can be seen in the figure below.

P4 RTK also has the ability to connect to Mobile Station D-RTK 2, NTRIP (Network Transport of RTCM via Internet Protocol), or store satellite observation data to be used for Post Processed Kinematics (PPK). The D-RTK 2 mobile station was not measured in this study, instead the NTRIP methods detailed in this report were used.
DJI Phantom 4 Pro will also be used in conjunction with GCPs to act as control data. This study uses DJI models because they are the largest supplier of commercial drone hardware in the world and are used by industry professionals in construction, mining, investigation and insurance. The Phantom 4 Pro has been shown to produce the most accurate photogrammetric maps at the time of writing, compared to other DJI models. It is the most popular drone used by DroneDeploy customers, with over 23,000 flights per month.
02 Scenario
Linear measurement accuracy of the Phantom 4 Pro
Our previous study looked at linear measurement accuracy using the DJI Phantom 4 Pro in combination with GCP. The Phantom 4 RTK drone is part of the Phantom 4 series of drones and uses the same camera as the Phantom 4 Pro. In this study, we demonstrated that relative linear measurements were accurate to 1.1% of manual measurements taken on the ground. Average measurement errors showed that the margin of error would increase proportionally to the flight altitude with an average correlation coefficient of 0.42. There was a 0.35% improvement in measurement accuracy for maps flown over at a height of 66 feet compared to maps flown over at 100, 200, or 400 feet of elevation. Much of this can be attributed to image quality and allow a human operator to identify the center of such GCPS, which can be difficult with low-resolution maps.
We found that processing with ground control points reduced the average measurement error to 0.5 inches, an improvement of about 10 times, for all control lengths. Measurement errors for GCP maps also showed a similar 10-fold reduction in standard deviation of error, meaning that not only is the GCP data more accurate, it is more consistent and therefore reliable for applications where it is needed. a higher level of accuracy.
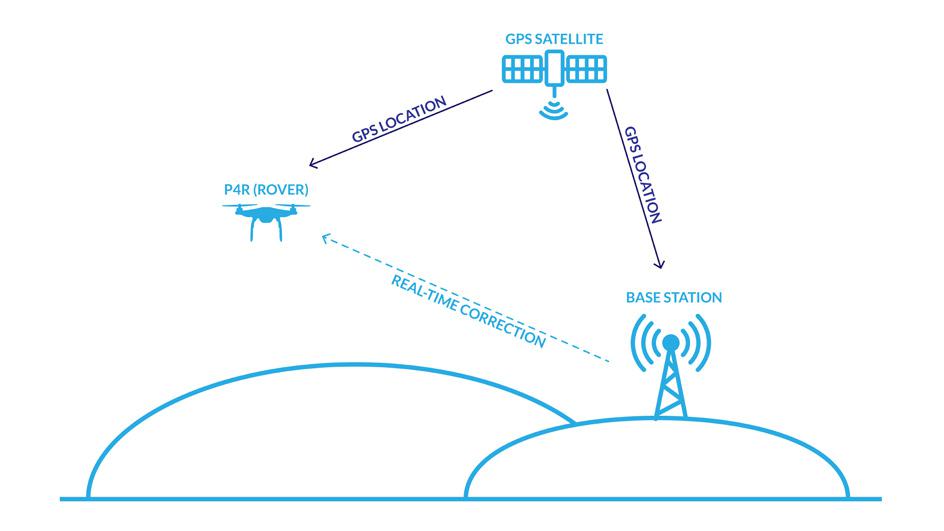
Real-time kinematics (RTK) and post-process kinematics (PPK) procedures
Kinematic is a common term used in traditional GPS surveying methods where receivers are in motion. To process the RTK data, you will need both an RTK base station and an RTK rover, in this case, the Phantom 4 RTK. For relative positioning, the common method used in surveying is the “Stop and Go” technique. RTK processing, on the other hand, does not require post processing to achieve accurate positioning. A radio to the reference receiver, a local base station or a network base station, transmits its position to the rover in real time. This enables surveying in the field and eliminates the need to check measurement quality during post-processing. An RTK workflow diagram can be seen in the figure.
PPK surveys are similar to RTK surveys, but positions are not corrected in real time. It usually consists of placing a fixed base station on a known checkpoint or monument to allow for geolocation. GPS data is then collected simultaneously from the base station and the drone as it flies. The data is then downloaded from the base station, the rover (drone) and posted using GPS software. These images can then be uploaded to DroneDeploy's Map Engine for processing.
03 Methodology
Establish a data validation method using GCPs and control points
To test the accuracy of the Phantom 4 RTK, DroneDeploy installed a control point system on the same test site used in the previous study. The control points, GCPs, control distances and their layout are shown in the figure below.
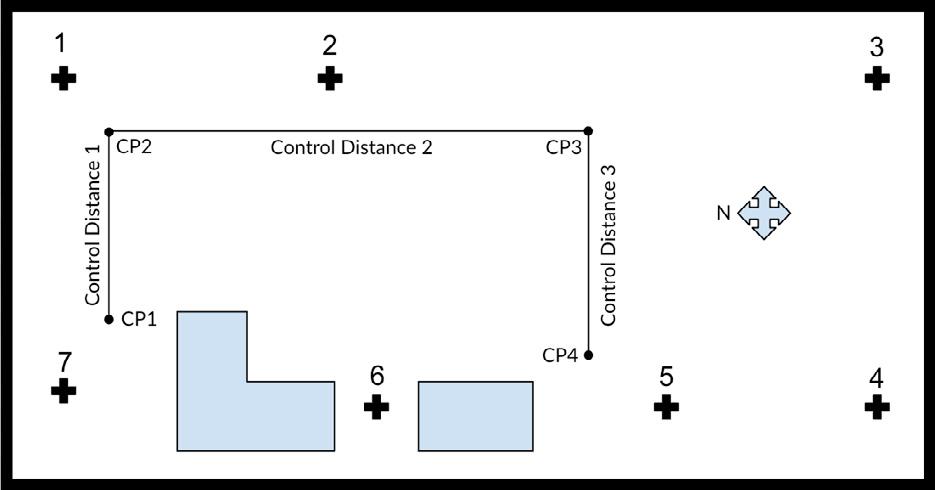
The system consisted of 7 different 1 'x 1' GCPs placed on our test site. These points have been placed at different heights, latitudes and longitudes on the surface to be able to better capture different scenarios. In addition, 4 checkpoints were placed on the roof and the distances between each were measured with a tape measure to establish the length between the points. They were then tagged and measured using a Trimble RTX GPS unit to identify the latitude, longitude and elevation of each of the points. These control distances demonstrate the variation in latitude, longitude and elevation between Phantom 4 Pro and P4 RTK flights.
Aerial data capture
To acquire the aerial data, DroneDeploy performed over 30 individual flights using the DJI Phantom 4 RTK and DJI GS RTK app for RTK flights and the Phantom 4 Pro V2.0 and DJI GS Pro app for P4 Pro with GCP flights. SmartNet, a third-party correction service was used for the RTK controller in conjunction with a mobile hotspot. SmartNet enables high-precision, high-availability network RTK corrections for any application, using any constellation, while being open to anyone at the same time. SmartNet allows centimeter-level accuracies linked to a common datum.

A total of 20 flights were made with the P4 RTK 100 feet above the roof surface, in both 2D and 3D photogrammetry modes and then processed with DroneDeploy's Map Engine. Likewise, 12 flights were made with the Phantom 4 Pro and processed with GCP with DroneDeploy's Map Engine to act as a control to compare results with. One of the aerial maps processed with checkpoints and GCPs can be seen in Figure 5 above. Slight variations were introduced in flight planning, lighting and altitude to simulate a real-world environment when collecting this data.
Land control point data capture for control
To acquire the GCPs for control, DroneDeploy tagged the geographic center of the targets positioned on the roof with a Trimble catalyst. The targeted points had a horizontal standard deviation of 0.24 cm and a vertical standard deviation of 0.49 cm between the 7 ground control points and the control points marked on the test site.
These points were also used as control points when measuring PK RTK accuracy versus GCP measurements. The Trimble catalyst, shown in the figure below, was chosen due to its simplicity, low cost, and highly accurate GNSS performance. In an independent study conducted by Geo Job UAV in early 2018, they deduced: "The coordinates of the catalyst were between 0.25 inches and less than 1 inch of the surveyor's results." Thanks to its integration with Trimble UAV Ground Control software, it also provided an easy way to acquire control point data for use with UAV solutions.

Trimble Catalyst is 'as a service' GNSS RTK positioning and can be used with any modern mainstream Android smartphone. The hardware configuration consists of any modern Android device, the Trimble Catalyst DA1 antenna and a standard sensing pole. The smartphone is used instead of a traditional data logger and is connected to the antenna via the supplied USB cable.
Instead of using a “hardware” GPS chip, Catalyst uses a fully software-defined GNSS receiver; Positions are calculated in the software, using the smartphone processor, reducing the size, weight and battery power demands of the entire system. The catalyst runs at 2-3m with no recurring account fees, but accuracies down to 1-2cm are easily achieved with a monthly subscription (which unlocks the receiver's high-accuracy modes and accelerates access to Trimble Now's localized VRS and global Trimble RTX correction services at no additional cost). To control the receiver, you need to install two apps from the Google Play Store, Trimble Mobile Manager and any of the specially created applications, in our case, the Trimble UAV Ground Control software.
Due to its simplicity, high level of accuracy and acceptance by DroneDeploy's customer base, we were able to use Trimble Catalyst to confidently ensure validation accuracy against P4 RTK. We recommend using a high-precision GNSS receiver, such as Catalyst, when processing maps with DroneDeploy to verify the accuracy of maps on your job site for auditing and security.
04 Key findings
P4 RTK provided 2cm relative vertical accuracy and 1.2cm relative horizontal accuracy
Each of the 4 control points has been tagged and measured with the Trimble GPS unit. The following table 3 shows the vertical accuracy of the control points, both in the RTK processed map and in the P4 Pro map with GCP. The GPS unit error is shown to understand the Trimble Catalyst vertical measurement error. About 30 measurements were captured and averaged for each GCP and checkpoint.
From these measurements, we obtain a relative vertical accuracy of approximately 3.3cm and a relative horizontal accuracy of 2.01cm. The relative vertical accuracy of all control points in the P4 RTK map was 2.00 cm. The relative vertical accuracy of the P4 Pro with GCPs for comparison was 1.95 cm.

Table 3. Comparison of vertical accuracy of P4 RTK versus P4 Pro with GCP measurements
With the P4 RTK, we achieved a relative horizontal accuracy of 1.20 cm. With the P4 Pro and GCPs, we achieved a relative horizontal accuracy of 0.90cm. In this study, we demonstrated that the P4 RTK can achieve a relative vertical accuracy of 2.00 cm and a relative horizontal accuracy of 1.20 cm when brought to 33 feet (100 feet). It is also important to note that the accuracy measurements for P4 RTK were taken using DroneDeploy's annotation and measurement tools. The GSD for the resulting maps is 0.4in / px on average.
Why is this important?
Determining accurate elevations is an essential part of many civil construction projects such as roads, bridges and highway projects. Drainage lines, drainage structures, and other highway features are designed with known and existing base plans, final elevations, or design plans. The preliminary and final cross-sections also determine the volumetric quantities. Additionally, accurate elevations are critical to ensure the reliability of photogrammetric mapping and orthophoto products within DroneDeploy and other photogrammetric software.
Given its importance in all other phases of the project development, vertical measurements are established at a control point, known as the GCP. Due to the considerable downstream effect of inaccurate vertical measurements, this is a critical component of pre-construction and the resulting error reduction is of the utmost importance.
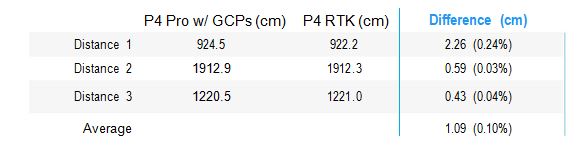
P4 RTK Control distances within 0.1% of P4 Pro with GCP measurements
In the linear measurement accuracy of the DJI Drone Platforms and Photogrammetry, we demonstrated that using a Phantom 4 Pro with GCP would produce a margin of error of approximately 0.64%. Using a Phantom 4 RTK, we were able to produce a margin of error of approximately 0.27% compared to “real world” measurements. In Table 2, we compare the PK RTK accuracy with the P4 Pro. On average, the P4 RTK measurements are within 1.09 cm, or 0.10%, of the P4 Pro measurements processed with GCP. These results show that using a Phantom 4 RTK drone, a user can expect an average accuracy of 1.09 cm on the RTK processed maps in DroneDeploy, when compared to similar maps used with the Phantom 4 Pro and processed with GCP.
Why is this important?
The accuracy of linear measurement is an important metric to consider due to its real-world applications. While it may be important to examine the horizontal and vertical accuracy of a single point, many civil construction projects look at grade lines, drainage along a road, stock volumetric or material area, all based on the accuracy of the point - point-to-point measurements.
This process involves understanding the change in accuracy when measuring the variation between points. For example, a horizontal or vertical accuracy of ± 2cm could equate to a linear measurement accuracy of ± 4cm between 2 points. This provides a more tangible understanding of how accuracy could affect the measurements of a road, bridge, highway, or other civil construction project.
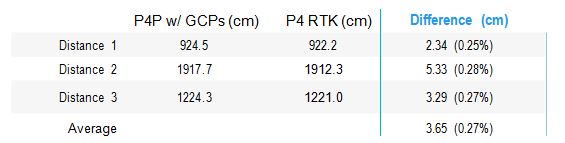
P4 RTK control distances within 0.27% of Trimble catalyst measurements
Once the P4 RTK maps were processed within DroneDeploy, the control distances were encoded and measured on all maps using DroneDeploy's measurement tools. The comparison between the P4 RTK map measurements and the real world measurements can be seen in Table 1 below. The average error for P4 RTK maps came in at 3.65cm, or about 0.27% of real-world measurements. For comparison, using GCP a user can expect an accuracy of 3cm, and using a GPS unit, such as a Trimble catalyst, a user can expect an accuracy of 3cm.
Looking only at the XY accuracy of the control points, the P4 RTK offers relative horizontal accuracy of 1.2cm. These results show that using a Phantom 4 RTK drone, a user can expect, on average, a linear measurement accuracy of 3.65cm on RTK processed maps in DroneDeploy. Note: Real world measurements were taken using a tape measure.
2D and 3D flights did not significantly affect the accuracy of the measurements
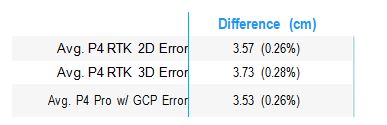
A total of five 2D and five 3D photogrammetry flights were flown using the DJI GSR app with P4 RTK. The results of this study can be viewed in Table 4 below. The mean linear measurement error for 2D flights was approximately 3.57 cm or 0.26%. The average linear measurement error for 3D flights was approximately 3.73cm or 0.28%. The mean linear measurement error for P4 Pro flights was approximately 3.53cm or 0.26%. At 0.16 cm of margin of error between 2D and 3D flights, we have no statistically significant variation in the accuracy of the linear measurement. When flying the P4 RTK for high-precision missions, the choice of 2D or 3D will depend on the user's needs, 2D in flight for relatively flat terrain and 3D flight for structures, buildings or other tall objects.
05 Conclusion
The measurement accuracy of the Phantom 4 RTK is able to meet the topographical level requirements
The degree of accuracy you would expect from certain projects depends on the final application and intended use of the survey data. Acceptable accuracy may be 30 cm or farther from the detected position. In some projects, the maximum acceptable error may be 5-7cm or less. According to the USGS Global Navigation Satellite System Committee, it is the surveyor's responsibility to know the survey accuracy requirements and match the accuracy of his receiver in combination with the accuracy of the correction information received based on the quality and location of the correction. .
Businesses today can achieve less than 3cm horizontal accuracy using traditional sensing methods. These allow them to perform accurate surveys, offers, classification operations and large-scale project management with ease. Most detection grade maps traditionally provide less than 3cm accuracy in the XY direction and approximately 9cm accuracy in the Z direction. In this study, we have shown that the RTK Phantom 4 can provide relative vertical accuracy of 2 cm and a relative horizontal accuracy of 1.20 cm with maps processed on DroneDeploy Map Engine (on average).
Based on these results, DroneDeploy recommends using the Phantom 4 RTK to create accurate maps for measuring point-to-point distances. Not only can you get accurate results, but in most cases using the Phantom 4 RTK for surveying will reduce the costs associated with traditional methods, including those spent on labor, hardware and software. This also translates into the overall benefits our customers gain, such as increased productivity, faster analysis times, better collaboration, and greater workplace safety. However, the use of some Ground Control Control Points (GCP 1-2) is still recommended to ensure accuracy and provide accountability for any measurement.

 https://www.instagram.com/3digital.tech/
https://www.instagram.com/3digital.tech/