

3DMakerPro Raven Testbericht: Der 999-Dollar-LiDAR-Scanner – Spezifikationen, Preis und Vergleich
Der Markt für tragbare LiDAR-Scanner ist um einiges interessanter geworden. 3DMakerPro hat den Raven offiziell vorgestellt, und mit einem Frühbucherpreis ab 999 US-Dollar übertrifft er alle bisherigen Standalone-LiDAR/SLAM-Scanner deutlich. Ein niedriger Preis ist jedoch nur dann von Bedeutung, wenn auch die Hardware überzeugt.
Hier ein detaillierter Blick auf die Spezifikationen des Raven, seine Position im Sortiment von 3DMakerPro, seinen Vergleich mit Konkurrenten wie dem FJD Trion, SHARE und anderen sowie auf potenzielle Probleme, die die Community bereits gemeldet hat.
Was ist 3DMakerPro Raven?
Der Raven ist der LiDAR-Weltraumscanner für Einsteiger von 3DMakerPro: eine kleinere, leichtere und deutlich günstigere Alternative zum aktuellen Eagle (Start Anfang 2025) und dem professionellen Hawk.
Angesichts der Entwicklung von 3DMakerPro von Objektscannern mit strukturiertem Licht (Maulwurf, Robbe, Elch) hin zu weltraumgestütztem LiDAR mit Eagle stellt Raven den nächsten logischen Schritt dar: autonomes, portables LiDAR-Scannen zu einem Preis, der es Hobbyisten, Content-Erstellern und kleinen Unternehmen ermöglicht, den Kauf realistisch zu rechtfertigen.
Das Gerät wurde erstmals auf der Formnext 2024 gesichtet. Erste Eindrücke ließen vermuten, dass es sich um eine kompakte Version des Hawk handelt, mit einem RTK-Erweiterungssteckplatz, einem Touchscreen und einem empfohlenen Preis von 999 US-Dollar. Diese ersten Details wurden nun durch das offizielle Datenblatt und die Preisangaben auf der 3DMakerPro-Shopseite bestätigt.

Für alle, die mit dem Scan-Workflow von 3DMakerPro noch nicht vertraut sind, bieten die Eagle-Scanner-Videos einen guten Überblick über die RayStudio-Software-Pipeline, den Scanvorgang und die zu erwartende Ausgabequalität. Raven nutzt dasselbe Software-Ökosystem und dieselben Ausgabeformate, daher bieten diese Tutorials einen direkt relevanten Kontext für die Raven-Benutzererfahrung.
3DMakerPro Raven Spezifikationen
Aus dem von 3DMakerPro veröffentlichten Datenblatt :
Genauigkeit: 2 cm auf 10 m, 3 cm auf 20 m, 5 cm auf 40 m
LiDAR-Erfassungsbereich: 40 m bei 10 % Reflexionsgrad / 50 m bei 80 % Reflexionsgrad
Maximale Scanabdeckung: 80–100 m (Hinweis: 3DMakerPro gibt dies als „Scanbereich“ an – siehe Erklärung unten)
Sichtfeld: 360° horizontal × 40° vertikal
Punktwolkenrate: 150.000 Punkte/Sek.
Laser: 905 nm, Klasse 1 augensicher (IEC60825-1:2014)
Kamera: 12 MP, 1 Kamera oder (2-Kamera-System bei der MAX-Version)
HDR-Modus: Nein
Display: 3,9" AMOLED
Akku: 12.000 mAh – ca. 2 Stunden Betriebszeit, unterstützt externe Stromversorgung beim Laden
Gewicht: 1,1 kg
Abmessungen: 148 × 288 × 98 mm
Integrierter Prozessor: 8 Kerne, 2,4 GHz, 32 GB Speicher (erweiterbar über TF-Karte)
Datenschnittstelle: USB-C ×1
Stromversorgung: USB-C ×1
Netzwerk: Wi-Fi 5
Ausgabeformate: 3D-PLY-Farbpunktwolke, 3D-PLY-Gaußsches Splatting, 3D-OBJ-Farbpolygonmodell
Erweiterung: RTK-Erweiterungsset, Insta360 X4/X5-Erweiterungsset, diverses Zubehör
Hinweis zu „Scanbereich“ und „Scanradius“: Lesen Sie dies vor dem Vergleich.
Dies ist ein Detail, das beim Vergleich von LiDAR-Scannern verwirrend sein kann und daher einer Klärung bedarf. 3DMakerPro verwendet zwei separate Spezifikationen, die ähnlich klingen, aber unterschiedliche Bedeutungen haben: „Scanreichweite“ bezeichnet die Erfassungsdistanz des LiDAR-Sensors, also die Entfernung, in der der Laser eine Oberfläche vom Gerät aus erfassen kann. „Scanbereich“ entspricht ungefähr dem gesamten Erfassungsdurchmesser (etwa dem doppelten Radius). Wenn 3DMakerPro also angibt, dass der Eagle eine „Scanreichweite von 140 m“ hat, entspricht dies einer Erfassungsreichweite von 70 m.
FJD Trion, SHARE und Livox geben die „Scanreichweite“ als Erfassungsdistanz an , was dem entspricht, was 3DMakerPro als „Scanbereich“ bezeichnet. Daher ist ein direkter Vergleich zwischen den „140 m Reichweite“ von 3DMakerPro und den „70 m Reichweite“ von FJD irreführend: Sie beschreiben tatsächlich dieselbe Leistungsfähigkeit. Alle Vergleiche in diesem Artikel verwenden, sofern nicht anders angegeben, die einheitliche Messgröße der LiDAR-Erfassungsreichweite (die vom Sensor erreichte Distanz) bei 80 % Oberflächenreflexion.
3DMakerPro Raven Preise
Hier kommt Raven ins Spiel. Zum Marktstart sind vier Konfigurationen zu vergünstigten Preisen erhältlich:
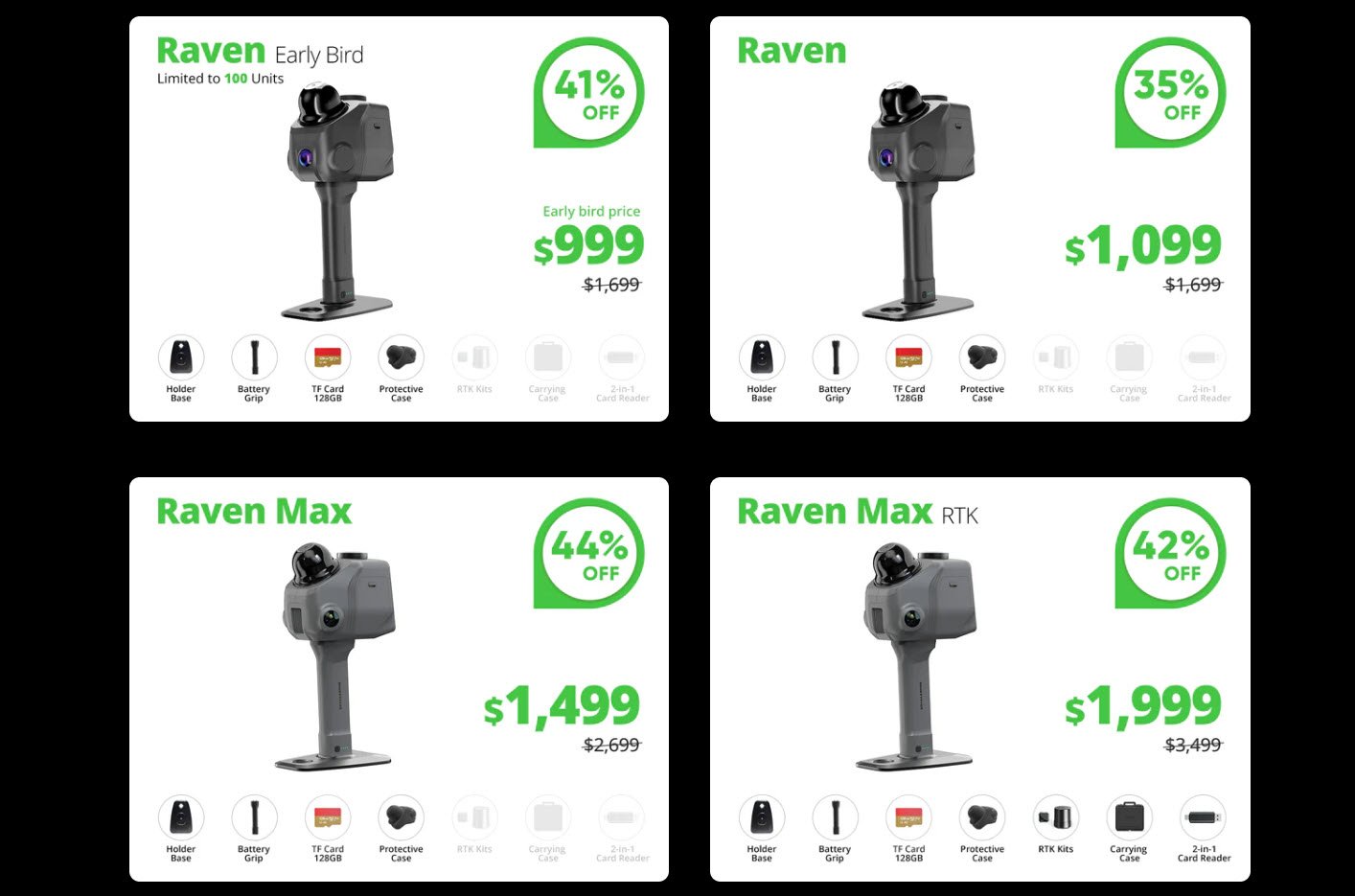
| Variante | Wichtigste Inhalte | ||
|---|---|---|---|
| Früher Rabe | Standfuß, Batteriegriff, 128-GB-TF-Karte, Schutzhülle | ||
| Krähe | Wie oben | ||
| Rabe Max | Enthält RTK-Kit, Tragetasche und 2-in-1-Kartenleser | ||
| Raven Max RTK | Komplettes Set mit RTK, Tragetasche und Kartenleser |
Raven vs. Eagle vs. Hawk vs. FJD Trion vs. SHARE: Vollständiger Vergleich
Hier ein Vergleich aktueller tragbarer LiDAR/SLAM-Scanner. Alle LiDAR-Reichweitenwerte basieren auf einer Erfassungsdistanz bei 80 % Reflektivität, um einen konsistenten Vergleich zu gewährleisten (siehe den Hinweis zu Scanreichweite vs. Strahl oben).
| Spezifikationen | Krähe | Adler | Falke | FJD P2 | FJD V4e | SHARE S20 SE | SHARE C1 |
|---|---|---|---|---|---|---|---|
| Präzision | 2 cm auf 10 m | 2 cm auf 10 m | 1,5 cm bei 10 m | 1,2 cm Stange | 3 cm Stange | ≤1 cm rel. | <1 cm |
| LiDAR-Reichweite* | 50 Meter | 70 Meter | 70 Meter | 70 Meter | 50 Meter | 70 Meter | 70 Meter |
| Punkte/Sek. | 150 Tausend | 200 Tausend | 480 Tausend | 200 Tausend | 154 Tausend | 200 Tausend | 200 Tausend |
| Vertikales Sichtfeld | 40° | 59° | 63,5° | 59° | ~70° | 59° | ~59° |
| Kamera | 12 MP (1-2) | 48 MP (1-4) | 13 MP 1" | 2x12MP | Telefon | 2x2,3 MP | Doppelte Breite |
| HDR | NEIN | 8K HDR | JA | NEIN | NEIN | NEIN | NEIN |
| Gewicht | 1,1 kg | 1,5 kg | ~0,9 kg | 0,7 kg | 0,89 kg | 0,955 kg | ~0,575 kg |
| Schlagzeug | ca. 2 Stunden | ca. 1 Stunde | ~1 Stunde Austausch | ca. 4 Stunden | 5+ Stunden | ca. 3 Stunden | ca. 3 Stunden |
| RTK | Optional | Optional | Eingetragen | Optional | Eingetragen | Optional | NEIN |
| Autonom | JA | JA | JA | JA | Nein (Telefon) | Nein (Telefon) | Nein (Telefon) |
| Gauss. Crash | JA | JA | JA | JA | JA | JA | Demnächst verfügbar |
| Preis | 999–1.999 US-Dollar | Ab ca. 3.399 € | Ab ca. 8.999 € | ca. 4.000 €+ | ~4.299 USD | Ab ca. 4.499 € | 3.999 $ (KS) |
*LiDAR-Reichweite = Erfassungsdistanz bei 80 % Oberflächenreflexion. 3DMakerPro bewirbt den Eagle mit einer „140 m Scan-Reichweite“ und den Raven mit einer „100 m Scan-Reichweite“ – diese Angaben beziehen sich auf den gesamten Erfassungsdurchmesser (ca. 2-fache Erfassungsdistanz) und sind nicht mit den FJD/SHARE-Spezifikationen zur „Scan-Reichweite“ vergleichbar. In dieser Tabelle wird die einheitliche Erfassungsdistanz verwendet.
Den LiDAR-Sensor verstehen: Warum er wichtig ist
Die Fachwelt schenkt dem vom Raven verwendeten LiDAR-Sensor große Aufmerksamkeit, und das aus gutem Grund: Er ist wohl die wichtigste Komponente eines jeden SLAM-Scanners.
Der Livox Mid-360 hat sich in dieser Klasse portabler SLAM-Scanner als De-facto-Standardsensor etabliert. Hergestellt von Livox (einer DJI-Tochtergesellschaft), ist er ein kompaktes Gerät mit einem Sichtfeld von 360° × 59°, 200.000 Messpunkten pro Sekunde und einer bewährten Reichweite von 70 m bei 80 % Reflexionsgrad.
Von entscheidender Bedeutung ist die breite Unterstützung des SLAM-Algorithmus in der Open-Source-Robotik-Community (einschließlich des eigenen Odometriesystems LIO-Livox von Livox) sowie die fundierte Erfahrung in professionellen Vermessungs- und Kartierungsanwendungen. Zahlreiche wissenschaftliche Studien haben die geometrische Genauigkeit bestätigt. Laut 3DMakerPro-Spezifikationen verwendet der Eagle Sensoren dieser Klasse. Die FJD Trion P1 und P2 nutzen Sensoren mit entsprechenden Spezifikationen (200.000 Punkte/s, 360° × 59° Sichtfeld, 70 m Reichweite). SHARE hat bestätigt, dass der S20/S20 SE direkt Mid-360 verwendet, wie auf der Livox-Produktseite dokumentiert.
Die veröffentlichten Spezifikationen des Raven – 150.000 Punkte/s, 360° × 40° vertikales Sichtfeld, 50 m Erfassungsbereich – zeigen deutlich, dass er kein Livox Mid-360 verwendet . Das engere vertikale Sichtfeld (40° gegenüber 59°) ist der bedeutendste Unterschied in der Praxis: Der Raven erfasst dadurch weniger Umgebungsdetails pro Durchgang, insbesondere in der Vertikalen. Das Scannen hoher Gebäude, das Erfassen von Decken in Innenräumen oder Arbeiten in beengten Räumen erfordern daher mehr überlappende Durchgänge und mehr Zeit. Die geringere Punktdichte (150.000 gegenüber 200.000) führt zwar zu einem etwas geringeren Detailgrad pro Sekunde, dies ist jedoch weniger relevant als das eingeschränkte Sichtfeld.
Dies ist nicht unbedingt ein ausschlaggebender Faktor, denn der 3DMakerPro erreicht seinen Preis von 999 US-Dollar dank eines günstigeren Sensors, aber es ist ein Kompromiss, den man verstehen sollte.
Der LiDAR-Sensor beeinflusst direkt die Punktwolkendichte, die Stabilität gegenüber SLAM-Drift und die Zuverlässigkeit des Scannens in anspruchsvollen Umgebungen. Mitglieder der Community in den Facebook-Gruppen „Raven“ und „Eagle“ von 3DMakerPro haben dies als ihr Hauptanliegen hervorgehoben, und das zu Recht.
3DMakerPro hat den Hersteller und das Modell des Raven-Sensors nicht öffentlich bekannt gegeben (zumindest ist mir das nicht bekannt).
Ein weiterer Mangel ist das Fehlen der IMU-Spezifikation, da die IMU (Inertial Measurement Unit) für die SLAM-Stabilität und Driftkontrolle von entscheidender Bedeutung ist, insbesondere in strukturlosen Umgebungen wie langen Korridoren, offenen Feldern oder Tunneln.

Livox Mid-360 Sensormodul.
Was zeichnet 3DMakerPro Raven aus?
Der Preis ist wirklich revolutionär. Für 999 bis 1.099 US-Dollar (Basisversion Raven) erhält man einen eigenständigen LiDAR-Scanner mit AMOLED-Touchscreen, integrierter Bildverarbeitung und Gaussian-Splatting-Ausgabe. Weder Smartphone noch Laptop oder Kabelverbindung sind zum Scannen erforderlich. Das FJD Trion V4e LiDAR Kit, der nächstliegende Budget-Konkurrent auf dem Markt für tragbare SLAM-Scanner, benötigt ein iPhone 15+ und kostet über 4.000 US-Dollar (derzeit 4.299 US-Dollar im Angebot von 4.799 US-Dollar). Der SHARE C1 zielt über Kickstarter auf eine ähnliche Zielgruppe von ambitionierten Hobbyanwendern ab, die endgültigen Preise und Lieferzeiten stehen jedoch noch nicht fest.
Zwei Stunden Akkulaufzeit sind ein deutlicher Vorteil gegenüber der etwa einen Stunde des Eagle (laut 3DMakerPro-Spezifikationen, die für den Eagle 60 Minuten angeben). Man kann damit problemlos ein ganzes Gebäude, innen wie außen, scannen, ohne eine Powerbank zu benötigen. Der Raven unterstützt außerdem die Stromversorgung über eine externe Plattform während des Scans, was praktisch ist, falls der Akku versehentlich leer ist.
Die Erweiterung um Insta360 X4/X5 und RTK ermöglicht es Raven, sich an ein breiteres Anwendungsspektrum anzupassen. Anwender, die ihre Workflows mit Insta360 für Gaussian Splatting und RTK/PPK optimieren möchten, profitieren von individuell anpassbaren Upgrade-Optionen. Ich schätze diesen Ansatz, da er den Einstieg kostengünstig gestaltet und gleichzeitig Raum für professionellere Workflows lässt.
Sie arbeitet völlig autonom. Im Gegensatz zur FJD V4e (erfordert ein iPhone 15+), der FJD P2 (erfordert ein Smartphone oder Tablet für die Echtzeitüberwachung über die FJD Trion Scan App) und der SHARE S20/C1-Serie (erfordert die SHARE Capture App) arbeitet die Raven dank ihres integrierten 3,9-Zoll-AMOLED-Bildschirms und des internen Speichers völlig autonom. Dies ist unerlässlich für den Außeneinsatz an abgelegenen Orten oder für Anwender, die einen einfacheren und effizienteren Workflow wünschen.
Wo sind die Sorgen?
Der LiDAR-Sensor stellt im Vergleich zur Konkurrenz einen deutlichen Rückschritt dar. Wie bereits erwähnt, liegt der Raven mit seinen 150.000 Punkten/Sekunde, dem vertikalen Sichtfeld von 40° und der Erfassungsreichweite von 50 m hinter allen anderen LiDAR-Scannern in diesem Vergleich zurück. Die geringere vertikale Abdeckung bedeutet mehr Scanvorgänge in komplexen Umgebungen und potenziell eine schwächere SLAM-Erfassung in Bereichen mit vertikalen Unebenheiten.
Mitglieder der 3DMakerPro Raven- und Eagle-Nutzergruppen auf Facebook haben diese Bedenken offen geäußert. Der Sensor scheint ein minderwertiges Modell zu sein, das für einfache Anwendungen gedacht ist. Für Workflows, bei denen die Laserleistung wichtiger ist als die Kameraleistung, stellt dies einen klaren Kompromiss dar.
Es wurden keine IMU-Spezifikationen veröffentlicht. Die IMU ist für die SLAM-Stabilität und Driftkontrolle unerlässlich, und erfahrene Anwender berichten von deren Fehlen. Bedeutet das aber, dass sie keine verwenden (oder dass sie einfach nicht sehr effektiv ist)? Wer weiß das schon?
Die Software-Bilanz von 3DMakerPro ist nicht gerade berauschend. Nach ausgiebiger Nutzung von Eagle Max und RayStudio ist es wichtig, in diesem Bereich realistische Erwartungen zu haben. Eagle wurde Anfang 2025 mit einer ambitionierten Software-Roadmap veröffentlicht: Laut der RayStudio-Tutorialseite von 3DMakerPro waren die Gaussian-Splatting-Verarbeitung für den 10. April 2025, die Punktwolkenvernetzung für den 15. April und das Zusammenfügen von Panoramabildern für den 30. April geplant. In der Praxis wurden die Funktionen jedoch deutlich später als erwartet eingeführt, und unabhängige Tests (darunter ein ausführlicher Test von 3Printr.com) beschreiben RayStudio durchweg als zwar funktional, aber noch nicht ausgereift.
Stabilitätsprobleme, insbesondere unter macOS, sind hinlänglich bekannt. Der Workflow für die Nachbearbeitung erfordert weiterhin Geduld. Die Software hat sich im letzten Jahr zwar verbessert, aber dieser Prozess verlief schleppend. Da Raven dasselbe Software-Ökosystem nutzt, ist mit einer ähnlichen Entwicklung zu rechnen und nicht mit einem ausgereiften Beta-Tester-Erlebnis.
Hoffen wir einfach, dass Eagle und Hawk die notwendigen Fortschritte erzielt haben, um Raven zu einem besseren Startplatz zu machen!

Philipp Kreiser (PrinterForFun) äußert Skepsis hinsichtlich des Lidar-Sensors und des ersten Scans.
RTK = Echtzeit oder nur Nachbearbeitung? Diese Frage ist bei der 3DMakerPro-Produktlinie noch etwas unklar. Die offiziellen Eagle-FAQs beschreiben RTK als Echtzeit-Kinematik-Positionierung, aber das RayStudio-Workflow-Tutorial im 3DMakerPro-Blog zeigt, dass RTK-Daten als Nachbearbeitungsschritt angewendet werden („RTK-Option in den Verarbeitungsschritten auswählen“).
Innerhalb der Community gibt es widersprüchliche Berichte darüber, ob eine echte Echtzeit-RTK-Korrektur zuverlässig funktioniert oder ob es sich tatsächlich um PPK (nachbearbeitete Kinematik) handelt.
Wenn Ihnen die Genauigkeit der Georeferenzierung für Ihren Arbeitsablauf wichtig ist, lohnt es sich, vor dem Kauf des Raven RTK-Kits echte Benutzerbewertungen zu lesen (ich hoffe, ich kann Ihnen ein Gerät zum Testen zur Verfügung stellen).
Zum Vergleich: Sowohl die FJD Trion-Serie als auch die SHARE S20 RTK bieten gut dokumentierte Echtzeit-RTK-Workflows mit nachgewiesenen Genauigkeitsspezifikationen, allerdings zu ganz unterschiedlichen Preisen.
Die ersten Scan-Ergebnisse waren nicht überzeugend. Philipp Kreiser (PrintedForFun / 3D Scanning Users Group) wies in seinem Präsentationsvideo darauf hin, dass die ersten veröffentlichten Raven-Scans nicht besonders überzeugend wirkten. Die Vorabversion der Hardware wird sich durch Firmware- und Software-Updates verbessern, derzeit stehen jedoch nur wenige unabhängige Scan-Daten zur Verfügung, um die Leistung im realen Einsatz zu beurteilen.
Die 12-Megapixel-Kameras ohne HDR bedeuten, dass farbige Punktwolken und Gaußsche Flächendarstellungen nicht die Bildqualität der 48-Megapixel-Kameras des Eagle mit 8K-HDR-Ausgabe oder der beiden 1-Zoll-16-Megapixel-Kameras des SHARE S20 mit mechanischem Verschluss erreichen. Wo es auf hohe Bildqualität ankommt – virtuelle Rundgänge, hochwertige Gaußsche Flächendarstellungen, Immobilienbesichtigungen – stellt dies eine deutliche Verschlechterung dar.
An wen wendet sich die Krähe eigentlich?
Der Raven positioniert sich klar als Einsteigergerät in die Welt des portablen LiDAR-Scannens. Seine Ziele sind:
Für alle, die von iPhone oder iPad auf LiDAR umsteigen: Wenn Sie bisher Polycam, SiteScape oder Scaniverse mit dem integrierten LiDAR Ihres Smartphones genutzt und die Grenzen dieser Tools erreicht haben, bietet Raven einen enormen Fortschritt in puncto Reichweite, Scanvolumen, Punktdichte und Workflow. Und das zu einem Preis, der keiner professionellen Rechtfertigung bedarf.
Enthusiasten, Bastler und Content-Ersteller, die Räume, Gebäude oder Außenumgebungen für private Projekte, die Erstellung von Spielinhalten, Gaussian-Splatting-Experimente oder Dokumentationen erfassen möchten, werden von diesem Scanner begeistert sein. Dank des eigenständigen Workflows und des Einstiegspreises von unter 1.000 US-Dollar ist er im Gegensatz zu anderen tragbaren LiDAR-Scannern eher ein Spontankauf.
Kleinunternehmen, die virtuelle Rundgänge und räumliche Dokumentation nutzen möchten, ohne professionelle Vermessungsgeräte anschaffen zu müssen, können Raven verwenden. Immobilienmakler, Veranstaltungsorte und Sanierungsfirmen finden die räumliche Datenerfassung von Raven möglicherweise ausreichend für weniger kritische Anwendungen.
Für professionelle Vermesser, Architekten und alle, die mit BIM/CAD arbeiten: Der Raven ist wahrscheinlich nicht das richtige Werkzeug für Sie. Der FJD Trion P2 (nachbearbeitete Genauigkeit von 1,2 cm, Multi-SLAM-Fusion, HyperDense+-Technologie, zwei 12-MP-Kameras, bewährtes FJD Trion Software-Ökosystem), der SHARE S20 (relative Genauigkeit ≤ 1 cm, bestätigter Livox Mid-360-Sensor, zwei 1-Zoll-16-MP-Kameras mit mechanischen Verschlüssen) oder der 3DMakerPro Hawk (Genauigkeit von 1,5 cm auf 10 m, 480.000 Punkte/s mit Multi-Echo-LiDAR, Schutzart IP65) bieten allesamt eine deutlich bessere Leistung, allerdings zu entsprechend höheren Preisen.
Der Abschluss
Der 3DMakerPro Raven leistet etwas Einzigartiges: Er macht die Technologie für unter 1.000 US-Dollar zugänglich. Die Kompromisse sind bekannt und gut dokumentiert: ein LiDAR-Sensor mit geringerer Leistung, einem engeren Sichtfeld, einer kürzeren Reichweite, einfachere Kameras ohne HDR und ein noch nicht ausgereiftes Software-Ökosystem. Doch das Preis-Leistungs-Verhältnis ist überzeugend.
Die Frage ist nicht, ob der Raven besser ist als ein Scanner für über 4.000 US-Dollar. Das ist er nicht. Die Frage ist vielmehr, ob er gut genug ist, um eine neue Generation von Nutzern zu erreichen, die LiDAR-Scanning bisher vielleicht noch nie in Betracht gezogen haben. Angesichts der Spezifikationen, des Preises und der Erweiterungsmöglichkeiten lautet die Antwort wahrscheinlich ja, allerdings sollte man realistische Erwartungen hinsichtlich der Softwareoptimierung und der Scanqualität im Vergleich zu etablierten Konkurrenzprodukten haben.

 https://www.instagram.com/3digital.tech/
https://www.instagram.com/3digital.tech/